重温并发任务:Linux 多线程同步利器条件变量
- 2026-06-29 09:27:42
点击↑深色口袋物联,选择关注公众号,获取更多内容,不迷路
在glibc2.35中,pthread线程提供了5种同步机制,分别为条件变量、互斥锁、读写锁、自旋锁和屏障,本篇主要回顾条件变量
一、pthread 条件变量的核心作用
核心定义
在glibc2.35中,条件变量的定义在sysdeps/nptl/bits/pthreadtypes.h中pthread_cond_t
typedef union{ struct __pthread_cond_s __data; char __size[__SIZEOF_PTHREAD_COND_T]; __extension__ long long int __align;} pthread_cond_t;其中__data是真实的数据载体,包含了操作系统所需要的全部底层信息,__size,固定大小的字符数组,保证新旧版本的二进制兼容,以及一个长长整型变量,用于控制内存对齐
为什么要用union呢?首先这种设计模式被称为 “Tagged Union” 或 “Opaque Type”(不透明类型)的一种变体。对于编译器,它看到的是一个固定大小、固定对齐方式的变量类型;对于库开发者,可以通过 __data 来灵活修改内部实现细节;对于用户,只需声明 pthread_cond_t 变量并传给函数,不需要也不应该知道内部结构。
核心作用 & 设计初衷
条件变量的核心作用就是实现线程间「基于条件的有序协作」,解决「线程等待某个条件成立」的同步场景。
简单说:让某个 / 某些线程进入阻塞休眠状态,等待「指定条件满足」,当其他线程触发该条件后,再唤醒等待的线程继续执行。
它是 Linux 下 POSIX 线程库的线程同步核心机制,一般必须与互斥锁 pthread_mutex_t 配合使用,缺一不可
条件变量解决的核心痛点
线程开发中,有一个高频场景:线程 A 需要等待某个条件成立才能执行(比如等待数据就绪、等待任务完成),如果没有条件变量,只能用两种低效方式实现:
1. sleep()轮询:线程每隔一段时间判断条件,占用 CPU 资源,且时延不可控;2. while(条件)忙等:线程持续占用 CPU 循环判断条件,CPU 利用率直接拉满,性能暴跌。
条件变量完美解决以上问题,它的核心优势是:等待条件的线程会主动释放 CPU,进入内核休眠态,不占用任何 CPU 资源;条件满足时被精准唤醒,零 CPU 浪费。
与互斥锁的职责划分(必懂!二者互补,不是替代)
很多人混淆条件变量和互斥锁的作用,这是入门核心误区,二者必须搭配使用,各司其职、缺一不可,核心分工如下:
✅ 互斥锁(pthread_mutex_t)→ 负责「互斥」
• 保护共享的条件判断变量(比如全局的标志位、计数器、缓冲区),保证多线程对共享变量的读写是原子操作,避免数据错乱; • 核心能力:排他性访问共享资源,解决「能不能访问」的问题。
✅ 条件变量(pthread_cond_t)→ 负责「同步」
• 阻塞等待「条件成立」的线程,唤醒满足条件的线程继续执行; • 核心能力:控制线程的执行顺序,解决「什么时候执行」的问题。
✅ 核心结论:条件变量 + 互斥锁 = 线程同步的黄金组合,能解决** 99%** 的线程有序协作场景。
二、pthread 条件变量核心使用场景(全覆盖,无冗余,所有场景均不可替代)
条件变量的使用场景,全部围绕其核心能力:线程等待条件 + 条件满足唤醒,是线程同步中不可替代的核心机制,所有场景均为 Linux 应用层开发的高频刚需,覆盖嵌入式、服务器、工业控制等所有领域,无任何技术替代方案,按使用频率排序如下:
✅ 场景 1:经典「生产者 - 消费者模型」【最核心场景,占比 90%】
这是条件变量的头号使用场景,没有之一。
• 业务逻辑:生产者线程生产数据(写入缓冲区),消费者线程消费数据(读取缓冲区); • 同步需求:① 缓冲区为空时,消费者线程等待,直到生产者生产数据;② 缓冲区满时,生产者线程等待,直到消费者消费数据; • 实现方式:用 2 个条件变量分别控制「空缓冲区」和「满缓冲区」,搭配一把互斥锁保护缓冲区,完美实现生产 / 消费的有序协作。 • 典型案例:嵌入式设备的传感器数据采集(生产者)+ 数据解析(消费者)、服务器的请求接收(生产者)+ 请求处理(消费者)。
✅ 场景 2:线程的「按需启停 / 任务触发」
• 业务逻辑:主线程控制多个工作线程的启停,工作线程平时休眠,主线程下发任务后唤醒线程执行,执行完毕后线程再次休眠; • 同步需求:工作线程等待「任务就绪」的条件,主线程设置任务后唤醒线程,任务完成后线程重新进入等待; • 核心优势:线程休眠时不占用 CPU 资源,任务触发时精准唤醒,CPU 利用率趋近于 0,这是嵌入式低功耗设备的标配方案。
✅ 场景 3:多线程的「初始化屏障」
• 业务逻辑:程序启动时,需要先执行初始化线程完成全局资源初始化(比如配置加载、硬件初始化、连接建立),初始化完成后,所有业务线程才能开始执行; • 同步需求:所有业务线程等待「初始化完成」的条件,初始化线程完成后,调用 pthread_cond_broadcast唤醒所有业务线程;• 实现优势:相比 sleep 轮询,条件变量能做到「初始化完成立即唤醒」,无任何时延,效率拉满。
✅ 场景 4:多线程的「有序执行」
• 业务逻辑:需要严格控制线程的执行顺序,比如「线程 A→线程 B→线程 C」依次执行,或「线程组 A 执行完后,线程组 B 才能执行」; • 同步需求:每个线程等待前一个线程执行完成的条件,前一个线程执行完毕后,唤醒下一个线程; • 对比优势:相比用互斥锁实现的有序执行,条件变量的代码更简洁、逻辑更清晰,无任何轮询开销。
✅ 场景 5:超时等待场景(生产级必备)
• 业务逻辑:线程需要等待某个条件成立,但不能无限等待,超过指定时间后,无论条件是否满足,都要退出等待并执行兜底逻辑; • 实现方式:使用 pthread_cond_timedwait替代pthread_cond_wait,设置超时时间,超时后返回ETIMEDOUT,线程执行兜底逻辑;• 典型案例:网络连接超时等待、硬件响应超时等待、任务超时处理,这是生产环境防卡死的核心方案。
三、pthread 条件变量 核心接口(全量 + 详解,无冗余,背会即用)
条件变量的所有接口都在 <pthread.h> 头文件中,编译时必须加 -lpthread 链接线程库,接口数量少、逻辑简单,所有接口均有固定使用范式,掌握后零出错,按使用频率排序如下,所有接口返回值:成功返回 0,失败返回错误码。
✅ 1. 条件变量的初始化(2 种方式,按需选择)
方式 1:静态初始化(推荐,全局 / 静态变量使用)
pthread_cond_t cond = PTHREAD_COND_INITIALIZER;• 特点:一行完成初始化,无需手动销毁也不会内存泄漏,最简单高效,开发中 90% 场景用此方式。
方式 2:动态初始化(局部变量 / 堆变量使用)
int pthread_cond_init(pthread_cond_t *restrict cond, const pthread_condattr_t *restrict attr);• 参数 1 cond:待初始化的条件变量地址;• 参数 2 attr:条件变量属性,传NULL使用默认属性即可;• 配套操作:动态初始化的条件变量,使用完毕必须调用 pthread_cond_destroy销毁!
✅ 2. 条件变量的销毁(对应动态初始化)
int pthread_cond_destroy(pthread_cond_t *cond);• 作用:释放条件变量占用的内核资源,避免内存泄漏; • 注意:静态初始化的条件变量,不需要调用该接口。
✅ 3. 阻塞等待条件成立(核心接口,最常用)
int pthread_cond_wait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex);核心功能 + 底层执行逻辑(重中之重,必懂)
该接口执行时,会做「原子两步操作」,这是条件变量的核心设计,也是线程安全的保障:
1. 调用瞬间,自动释放传入的互斥锁 mutex;2. 线程立即进入阻塞休眠状态,等待被其他线程唤醒; 3. 当线程被唤醒( pthread_cond_signal/broadcast)后,线程会自动重新获取这把互斥锁,获取成功后,才会从pthread_cond_wait返回,继续执行后续代码。
关键注意
• 线程在休眠期间,不占用 CPU 资源,这是条件变量的核心优势; • 唤醒后必须重新抢锁,保证后续访问共享变量的线程安全。
✅ 4. 超时阻塞等待条件成立(进阶接口,生产级必备)
int pthread_cond_timedwait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex, const struct timespec *restrict abstime);• 作用:和 pthread_cond_wait功能一致,区别是增加了超时时间,超时后无论条件是否满足,都会自动返回;• 参数 3 abstime:绝对时间(不是相对超时时间),格式是struct timespec,包含秒 + 纳秒;• 返回值:超时返回 ETIMEDOUT,成功返回 0,失败返回其他错误码;• 核心价值:避免线程永久阻塞,是生产环境必用的防卡死方案。
✅ 5. 唤醒等待的线程(2 个唤醒接口,按需选择)
接口①:唤醒「至少一个」等待该条件的线程(精准唤醒,推荐)
int pthread_cond_signal(pthread_cond_t *cond);• 核心特点:只唤醒等待队列中的任意一个线程(内核调度策略决定),不会唤醒全部; • 适用场景:生产 / 消费模型、单任务唤醒,精准高效,是开发中最常用的唤醒方式。
接口②:唤醒「全部」等待该条件的线程(广播唤醒)
int pthread_cond_broadcast(pthread_cond_t *cond);• 核心特点:唤醒等待队列中的所有线程,所有被唤醒的线程会重新竞争互斥锁,抢到锁的线程先执行; • 适用场景:多个线程等待同一个条件,条件满足时需要所有线程同时执行(比如初始化完成后,所有业务线程一起启动)。
四、条件变量 核心对比(3 组高频对比,厘清技术边界,选型不迷茫)
✅ 对比 1:条件变量 vs 互斥锁(最核心对比,必懂)
二者是互补关系,不是替代关系,所有条件变量必须搭配互斥锁使用,核心差异总结如下,一目了然:
✅ 核心结论:互斥锁解决「能不能访问」,条件变量解决「什么时候访问」。
✅ 对比 2:pthread_cond_signal vs pthread_cond_broadcast
二者都是唤醒线程的接口,属于同类型接口的选型对比,无优劣之分,按需选择即可:
✔️ pthread_cond_signal(精准唤醒)
• 优点:只唤醒一个线程,线程调度开销小,性能高; • 缺点:只能唤醒一个线程,无法满足多线程同时执行的需求; • 适用场景:单生产者单消费者、单任务唤醒、精准通知,开发中 90% 场景用此接口。
✔️ pthread_cond_broadcast(广播唤醒)
• 优点:唤醒所有等待线程,满足多线程协作的需求; • 缺点:线程调度开销大,可能产生惊群效应; • 适用场景:多线程等待同一条件、初始化完成后唤醒所有线程、批量任务触发。
✅ 选型原则:能精准唤醒,绝不广播唤醒。
✅ 对比 3:pthread_cond_wait vs pthread_cond_timedwait
二者都是等待条件的接口,核心差异是「是否有超时机制」:
✔️ pthread_cond_wait(无限等待)
• 优点:接口简单,无需设置超时时间; • 缺点:条件不满足时,线程永久阻塞,存在卡死风险; • 适用场景:测试环境、条件必然会满足的业务场景。
✔️ pthread_cond_timedwait(超时等待)
• 优点:超时后自动返回,避免线程永久阻塞,生产环境必备; • 缺点:需要设置绝对时间,接口稍复杂; • 适用场景:生产环境所有场景,尤其是网络、硬件、超时任务等场景,推荐优先使用。
✅ 生产原则:线上代码,优先使用超时等待。
五、 3个完整示例(拿来就能跑)
代码才是硬道理。下面三个例子,涵盖了基础、超时和广播,直接拷贝到你的 ARM Linux 开发板上就能跑(记得编译加 -lpthread)。
示例 1:基础的生产者-消费者模型
这是最经典的用法。一个线程写数据,一个线程读数据。
#include <stdio.h>#include <stdlib.h>#include <pthread.h>#include <unistd.h>#define BUFFER_SIZE 5typedef struct { int buffer[BUFFER_SIZE]; int in; int out; int count;} CircularBuffer;CircularBuffer cb = {0};pthread_mutex_t lock = PTHREAD_MUTEX_INITIALIZER;pthread_cond_t not_empty = PTHREAD_COND_INITIALIZER;pthread_cond_t not_full = PTHREAD_COND_INITIALIZER;// 生产者void* producer(void *arg) { int item = 0; while (1) { item++; pthread_mutex_lock(&lock); // 关键点1:满了就等,必须用while while (cb.count == BUFFER_SIZE) { printf("【生产者】缓冲区满了,休息一下...\n"); pthread_cond_wait(¬_full, &lock); } // 写数据 cb.buffer[cb.in] = item; cb.in = (cb.in + 1) % BUFFER_SIZE; cb.count++; printf("【生产者】放入数据 %d, 当前数量: %d\n", item, cb.count); // 唤醒消费者 pthread_cond_signal(¬_empty); pthread_mutex_unlock(&lock); sleep(1); // 模拟生产耗时 } return NULL;}// 消费者void* consumer(void *arg) { while (1) { pthread_mutex_lock(&lock); // 关键点2:空了就等,必须用while while (cb.count == 0) { printf("【消费者】缓冲区空了,等待数据...\n"); pthread_cond_wait(¬_empty, &lock); } // 取数据 int item = cb.buffer[cb.out]; cb.out = (cb.out + 1) % BUFFER_SIZE; cb.count--; printf("【消费者】取出数据 %d, 当前数量: %d\n", item, cb.count); // 唤醒生产者 pthread_cond_signal(¬_full); pthread_mutex_unlock(&lock); sleep(2); // 模拟消费耗时 } return NULL;}int main() { pthread_t pro, con; pthread_create(&pro, NULL, producer, NULL); pthread_create(&con, NULL, consumer, NULL); pthread_join(pro, NULL); pthread_join(con, NULL); pthread_mutex_destroy(&lock); pthread_cond_destroy(¬_empty); pthread_cond_destroy(¬_full); return 0;}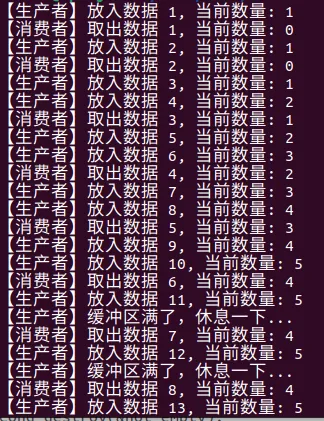
示例 2:带超时的等待(BSP 场景常用)
在实际 BSP 调试或驱动开发中,我们经常不能无限等硬件。这个例子演示了 pthread_cond_timedwait 的用法。
#include <stdio.h>#include <stdlib.h>#include <pthread.h>#include <unistd.h>#include <time.h>#include <errno.h>pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;pthread_cond_t cond = PTHREAD_COND_INITIALIZER;int data_ready = 0;// 模拟硬件中断或另一个线程发送信号void* hardware_thread(void *arg) { printf("[硬件] 正在初始化硬件...\n"); sleep(3); // 模拟硬件初始化耗时3秒 printf("[硬件] 初始化完成!\n"); pthread_mutex_lock(&mutex); data_ready = 1; pthread_cond_signal(&cond); // 发送信号 pthread_mutex_unlock(&mutex); return NULL;}// 模拟应用层等待硬件void* app_thread(void *arg) { struct timespec ts; clock_gettime(CLOCK_REALTIME, &ts); ts.tv_sec += 2; // 只等2秒 pthread_mutex_lock(&mutex); printf("[应用] 等待硬件就绪 (超时2秒)...\n"); // 等待,带超时 int ret = pthread_cond_timedwait(&cond, &mutex, &ts); if (ret == ETIMEDOUT) { printf("[应用] 超时了!硬件可能出问题了。\n"); } else { printf("[应用] 收到信号,硬件就绪成功!\n"); } pthread_mutex_unlock(&mutex); return NULL;}int main() { pthread_t t_hw, t_app; pthread_create(&t_hw, NULL, hardware_thread, NULL); pthread_create(&t_app, NULL, app_thread, NULL); pthread_join(t_hw, NULL); pthread_join(t_app, NULL); pthread_mutex_destroy(&mutex); pthread_cond_destroy(&cond); return 0;}
示例 3:广播机制
当有多个消费者线程,但只需要一个生产者发送一次通知,所有消费者都要醒来干活时,必须用 broadcast。比如重新加载配置文件。
#include <stdio.h>#include <stdlib.h>#include <pthread.h>#include <unistd.h>pthread_mutex_t lock = PTHREAD_MUTEX_INITIALIZER;pthread_cond_t cond = PTHREAD_COND_INITIALIZER;int config_updated = 0;void* worker(void *arg) { int id = *(int*)arg; pthread_mutex_lock(&lock); while (config_updated == 0) { printf("[Worker %d] 正在等待配置更新...\n", id); pthread_cond_wait(&cond, &lock); // 所有线程都在这等着 } printf("[Worker %d] 收到广播!开始应用新配置...\n", id); pthread_mutex_unlock(&lock); return NULL;}void* master(void *arg) { sleep(2); // 模拟读取配置文件 pthread_mutex_lock(&lock); config_updated = 1; printf("[Master] 配置已更新,通知所有 Worker!\n"); pthread_cond_broadcast(&cond); // 一次性叫醒所有人 pthread_mutex_unlock(&lock); return NULL;}int main() { pthread_t master_tid; pthread_t workers[3]; int ids[3] = {1, 2, 3}; pthread_create(&master_tid, NULL, master, NULL); for(int i=0; i<3; i++) { pthread_create(&workers[i], NULL, worker, &ids[i]); } pthread_join(master_tid, NULL); for(int i=0; i<3; i++) { pthread_join(workers[i], NULL); } pthread_mutex_destroy(&lock); pthread_cond_destroy(&cond); return 0;}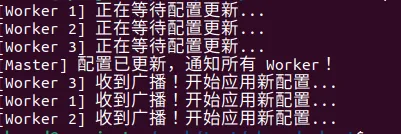
六、pthread 条件变量 的优缺点(完整总结,客观全面,选型参考)
✅ 优点(核心优势,无可替代)
1. 极致的 CPU 利用率:等待条件的线程进入休眠态,不占用任何 CPU 资源,相比轮询 / 忙等,CPU 利用率趋近于 0,这是条件变量的核心优势; 2. 精准的线程协作:能实现基于条件的有序执行,完美解决线程间的依赖关系,逻辑清晰、代码简洁; 3. 规避虚假唤醒:通过 while(条件)循环判断,可完全兼容 Linux 内核的虚假唤醒特性,线程安全;4. 低开销高并发:条件变量的唤醒 / 等待操作,都是轻量级的内核调用,开销极低,能支撑高并发场景; 5. 灵活的唤醒策略:支持精准唤醒和广播唤醒,能适配所有线程协作场景; 6. 超时保护机制:通过 timedwait 实现超时等待,避免线程永久阻塞,生产环境友好。
✅ 缺点(局限性,客观认知,避坑即可)
1. 必须依赖互斥锁:条件变量无法独立使用,必须搭配互斥锁,增加了少量的代码复杂度; 2. 存在虚假唤醒:虽然可以通过 while(条件)规避,但这是内核设计特性,需要开发者主动兼容;3. 广播唤醒有性能开销:调用 broadcast 时,会唤醒所有等待线程,产生一定的调度开销; 4. 超时时间是绝对时间:timedwait 的超时参数是绝对时间,需要通过 clock_gettime 获取当前时间,接口稍复杂; 5. 无法直接传递数据:条件变量只能实现线程的唤醒,无法直接传递数据,数据传递需要依赖共享变量。
✅ 优缺点总结
✔️ 条件变量的优点是压倒性的,是线程同步中最优的条件等待方案,没有任何技术能替代其核心价值;
✔️ 条件变量的缺点都是可规避的,通过规范的代码编写和合理的接口选型,能轻松解决所有局限性;
✔️ 结论:条件变量是 Linux 线程同步的必学、必会、必用的核心技术,没有之一。
全文核心总结(精华提炼,直击本质,背会即用)
1. 条件变量的核心是「等待 + 唤醒」,必须搭配互斥锁使用,互斥锁保资源安全,条件变量控执行顺序; 2. 黄金法则: while(条件)包裹 wait,先加锁再 wait,唤醒必持锁,遵守这三句话,永不踩坑;3. 核心接口只有 6 个,初始化→等待→唤醒→销毁,逻辑简单,固定范式,极易掌握; 4. 最核心场景是生产者 - 消费者模型,其次是线程启停、初始化屏障、超时等待; 5. 条件变量的优势是极致的 CPU 利用率,缺点是需要兼容虚假唤醒和依赖互斥锁,整体瑕不掩瑜; 6. 生产环境中,优先使用 pthread_cond_timedwait和pthread_cond_signal,兼顾安全性和性能。
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 视频:小牛顿慧编程精彩十周年!
- 5行代码复刻 OpenAI 数据神技!这个开源项目让 Text-to-SQL 彻底告别“人工智障”.
- 让AI写代码更靠谱的秘诀:先规划,后记录,再验证
- 任意代码执行的原子狩猎:从漏洞挖掘到系统沦陷的武器化工程
- 一位二进制男眼中的“Bug”----代码之蚊
- 上市公司业财融合数据+stata、python代码(2007-2024年)
- CIE_GESP:Python三级备考指南
- viser:让你在 Python 里也能轻松搞定“3D+交互”场景
- 《HM Python 进化论Vol.3》告别 createmark!用 Python Collection 优雅地“点名”
- 一图看懂Python基础和SQL基础
