在软体机器人和自适应纺织品的研发浪潮中,液晶弹性体(LCE)纤维因其高度的可逆应变和快速响应能力而备受关注,被广泛应用于假肢、微型驱动器等领域。然而,现有的制造技术大多局限于制备结构简单的单一材料纤维,难以实现自然界生物体(如植物卷须)那样复杂而精妙的驱动行为,这成为制约高性能人造肌肉与智能纤维发展的关键挑战。
为此,杭州师范大学刘俊秋教授、吴柏衡副教授合作,成功开发了一种连续不对称挤出平台,用于制造仿生Janus(双面)液晶弹性体纤维。该技术将具有刺激响应能力的LCE网络与结构可编程的动态共价聚氨酯(PU)网络无缝集成,通过动态键交换实现了液晶取向的按需编程。所制备的Janus纤维不仅机械性能增强,更展现出多模态驱动能力,包括自适应抓取物体、刺激响应定向运动以及可集成于智能织物中进行热管理,为开发具有环境自适应能力的仿生软体机器人系统开辟了新道路。相关论文以“Continuous fabrication of Janus liquid crystal elastomer fibers with programmable actuation”为题,发表在Nature Communications。
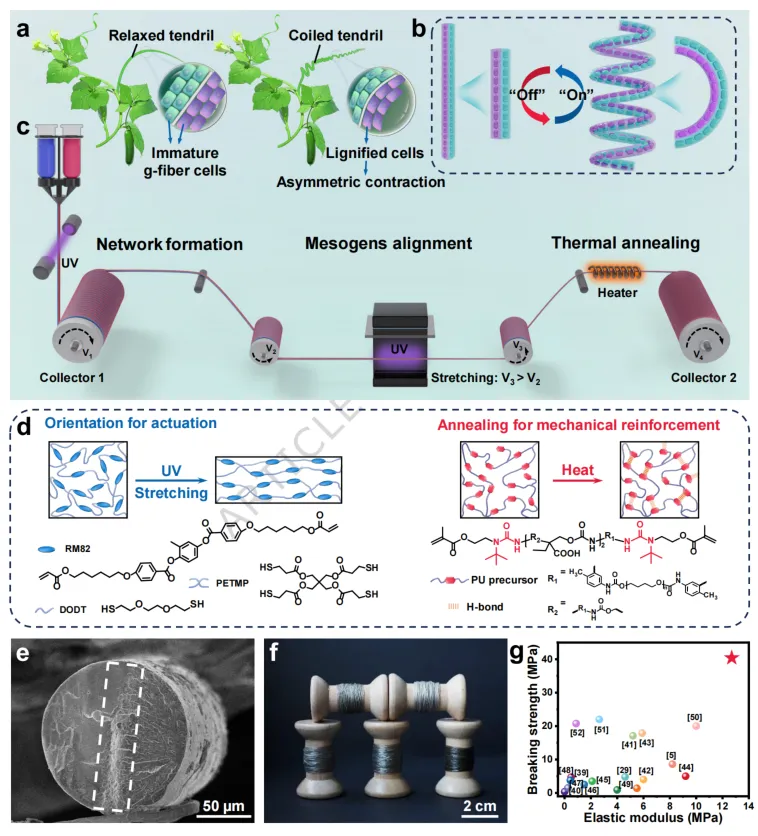
研究团队从植物卷须的不对称木质化中获得灵感,设计了一套连续的异步纺丝平台。如图1所示,该系统通过一个锥形Janus喷嘴共挤出来自LCE和PU的两种前驱体,并在原位紫外光照射下进行固化。这种受卷须启发的双材料结构,使得纤维在微观横截面上呈现出清晰的两相形态(图1e),并具备宏观规模生产的潜力(图1f)。与已报道的传统LCE纤维相比,Janus纤维展现出更高的弹性模量和断裂强度(图1g),这得益于PU组分的机械增强作用。
图1:Janus纤维的仿生设计与可扩展制造。 (a)自然卷须在松弛(左)与卷曲(右)状态下的形态。(b)植物Janus结构示意图。(c)用于生产Janus纤维的连续挤出-拉伸过程示意图。LCE的取向程度可由V3与V2的速率比决定。(d)LCE(左)与动态共价PU(右)的网络示意图及其各自前驱体的化学结构。(e)Janus纤维横截面的扫描电子显微镜(SEM)图像,较粗糙区域为LCE相,较光滑区域为PU相。(f)绕在线轴上的Janus纤维光学图像。(g)Janus LCE纤维与文献报道的传统LCE纤维在弹性模量和断裂强度上的对比。
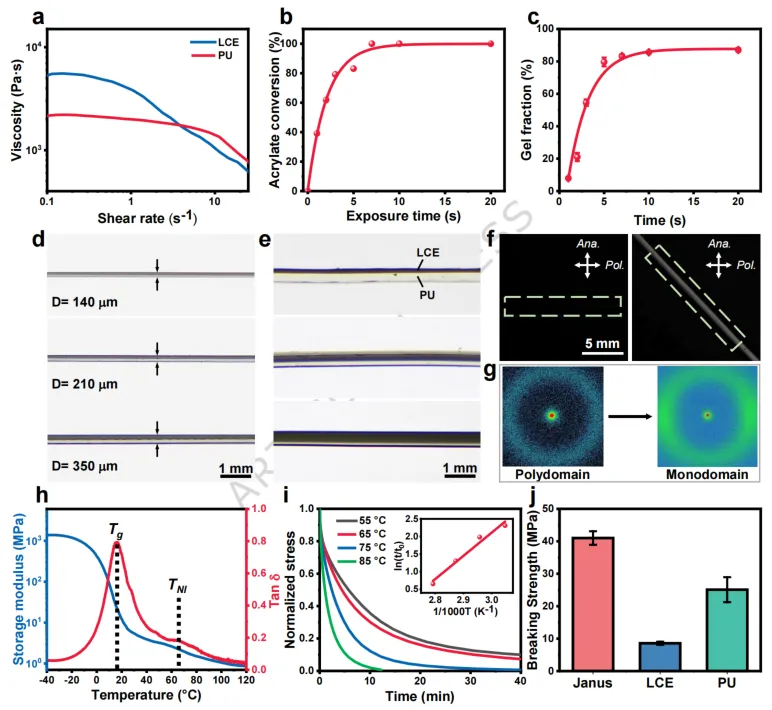
成功连续制备的关键在于两种材料在流变行为和聚合动力学上的精确匹配。如图2a所示,两种前驱体均具有高粘度和剪切稀化行为,确保了稳定的共挤出。它们的紫外光聚合动力学也高度同步(图2b, c),使得两种网络能够同时快速形成。通过调整挤出速度,可以调控纤维的直径和两组分比例(图2d, e)。偏振光学显微镜(POM)和二维广角X射线散射(2D-WAXS)表征证实了LCE相中液晶基元的良好取向(图2f, g)。动态力学分析(DMA)揭示了纤维的两个特征热转变:LCE的玻璃化转变和向列相-各向同性相转变(图2h),而PU网络在55°C以上表现出由氢键动态交换导致的应力松弛行为(图2i)。Janus结构显著提升了纤维的断裂强度(图2j),单根纤维即可承载远超自重的负载。
图2:Janus纤维的结构与表征。 (a)25°C下LCE和PU前驱体的粘度随剪切速率变化曲线。(b)LCE前驱体的光聚合动力学。(c)不同紫外光照射时间下PU网络的凝胶化动力学。(d)不同直径Janus纤维的光学显微镜图像。(e)不同组分比例的Janus纤维光学显微镜图像。(f)Janus纤维的偏振光学显微镜(POM)图像。V3与V2的速率比为1.8。(g)取向前后LCE区域的二维广角X射线散射(2D-WAXS)图案。(h)LCE的储能模量和tan δ演变。(i)PU的应力松弛行为。(j)Janus纤维、纯LCE纤维及纯PU纤维的断裂强度对比。
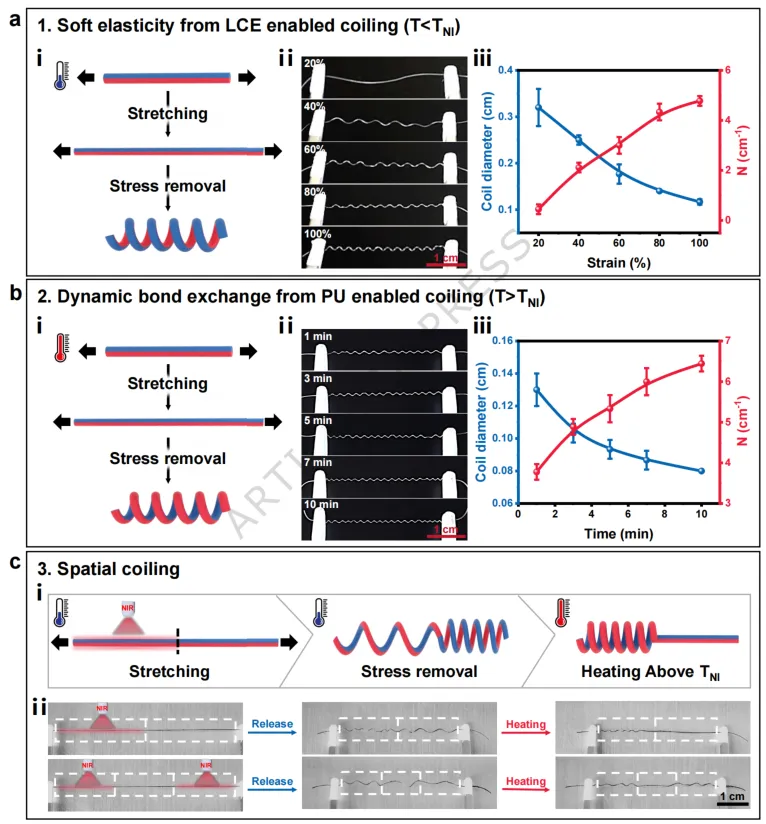
驱动行为的可编程与可重编程是Janus纤维的核心优势。图3展示了两种主要的编程策略。第一种策略利用LCE在室温下的软弹性(图3a),通过直接机械拉伸并释放,使纤维因两相材料的不对称收缩而发生螺旋卷曲,卷曲密度随预应变增大而增加。第二种策略则利用高温下PU的动态键交换(图3b),在90°C下拉伸并退火后,PU发生塑性变形而LCE恢复,冷却后纤维同样产生卷曲,且卷曲密度随退火时间延长而增大。此外,通过近红外激光对纤维进行空间选择性辐照(图3c),可以在单根纤维上实现异质编程,使其不同区域在加热时呈现相反的形态变化(线性变螺旋或螺旋变线性),展现了在连续结构中实现按需求异质驱动的能力。
图3:利用不同机制实现Janus纤维的可编程卷曲行为。 (a)通过LCE区域的软弹性进行编程。i) 编程过程示意图。ii) 展示不同应变下卷曲变化的实物照片。iii) 不同应变下线圈直径和螺旋密度的量化。(b)通过PU区域的动态键交换进行编程。i) 编程过程示意图。ii) 展示不同热退火时间下卷曲变化的实物照片。iii) 不同退火时间下线圈直径和螺旋密度的量化。(c)用于双模态形状转变的空间选择性编程。i) 空间编程策略示意图。ii) 展现空间可控形状变化的Janus纤维实物照片。纤维表面涂有碳纳米管以促进光热转换。所有示意图中,蓝色代表LCE,红色代表PU。在进行编程实验前,Janus LCE纤维是未取向的。
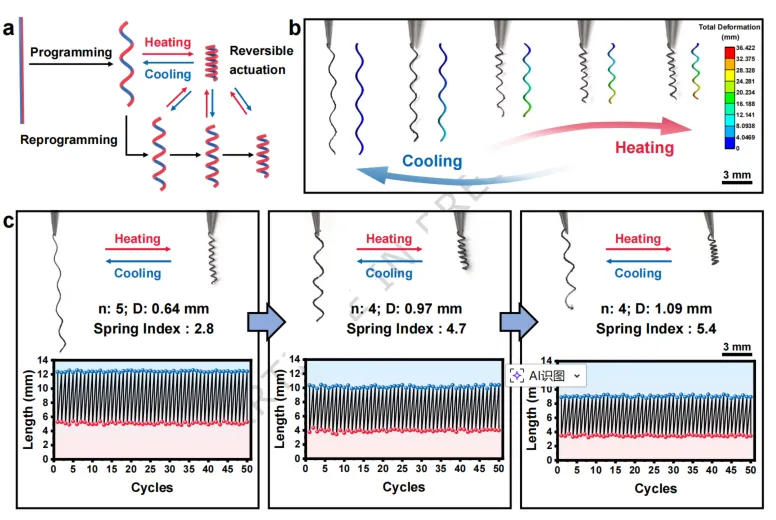
动态共价键进一步赋予了纤维卓越的可重编程性。如图4所示,编程后的纤维能够在松散和紧密的螺旋构型之间可逆切换,并在200次加热-冷却循环中保持优异的稳定性(图4b)。更重要的是,通过动态键交换,可以将纤维重新编程成具有不同螺旋几何形状的新结构(图4c),有限元分析与实验结果高度吻合,预示了其作为软体机器人执行器的潜力。
图4:由动态键交换实现的Janus纤维可重编程驱动行为。 (a)示意图展示Janus纤维中通过动态共价键交换实现的可逆热驱动与可重编程结构重构之间的协同作用。(b)在循环加热(70°C)与冷却(25°C)下,松散与紧密螺旋构型之间可逆驱动的实验演示及相应的有限元分析。(c)经过重编程的、具有三种不同螺旋几何形状(展示不同螺旋圈数和弹簧指数)的Janus纤维的驱动循环。所有示意图中,蓝色代表LCE,红色代表PU。
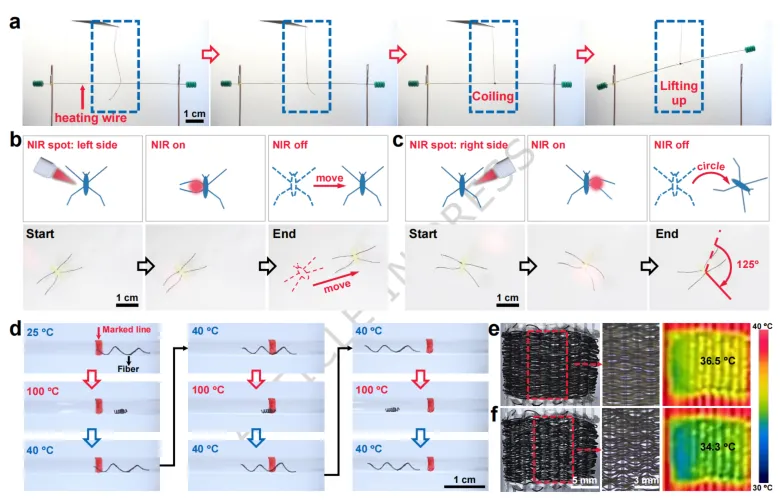
在功能演示方面(图5),Janus纤维展现出多模态驱动能力。受植物卷须启发,纤维能在局部加热(如接近90°C热丝或近红外激光照射)时自发卷曲,实现物体的抓取与释放(图5a)。研究人员还设计了以Janus纤维为腿的“水黾”机器人,通过激光选择性照射不同朝向的“腿”,能实现定向移动(图5b)或可控旋转(图5c)。此外,具有梯度螺旋结构的弹簧状纤维在受限管道中可通过热循环实现尺蠖式定向爬行(图5d)。最后,Janus纤维可被编织进智能织物(图5e),当织物被拉伸时,纤维发生螺旋转变,增加织物孔隙率,从而可逆地显著提升其隔热性能(图5f),展现了在自适应热管理穿戴设备中的应用前景。
图5:Janus纤维的多模态驱动及应用演示。 (a)Janus纤维自发卷曲以承载热丝的过程时序快照。(b)由近红外激光(808 nm)照射触发的定向运动示意图(上)与实验图像(下)。(c)由近红外激光照射触发的旋转运动示意图(上)与实验图像(下)。(d)具有梯度螺旋结构的Janus LCE纤维机器人在受限通道中的定向爬行。(e)置于40°C平台上的平面Janus LCE织物在未拉伸状态下的光学与红外图像。(f)单轴拉伸成多孔构型后的光学与红外图像,展示了可定制的隔热性能。
这项研究通过将刺激响应性LCE与可编程动态共价PU网络相结合,成功创造了兼具优异机械性能和多样化驱动能力的Janus纤维。该连续制造策略不仅突破了传统LCE纤维的结构与功能局限,更通过局部编程和层次化几何设计,实现了从线性到螺旋的转变、自主卷曲、定向运动乃至在狭小空间内爬行等多模态可逆驱动。其与纺织工艺的良好兼容性及所带来的可调隔热性能,进一步凸显了该类纤维作为软体机器人和自适应穿戴设备多功能构建模块的巨大潜力,为下一代基于纤维的智能材料系统奠定了基础。