磁驱软体微型机器人因其无线操控、生物相容性和高机动性,在精准医疗、微操作与复杂环境作业中展现出重要潜力。然而,长期以来,该领域面临一个核心矛盾:
在低磁场条件下实现高效驱动,往往需要高磁填料含量,而这又会严重损害材料的柔性、韧性与可加工性。
合肥工业大学与南方科技大学的研究团队在《Advanced Materials》上发表的最新研究成果。论文提出了一种基于单磁畴磁性胶体的磁畴组装策略,成功实现了低磁场、低磁含量条件下软体微型机器人的快速变形与多模态运动,为磁驱软体机器人提供了新的材料与结构设计范式。

【问题背景:低磁场驱动为何困难】
在生物体内或微尺度应用中,驱动磁场通常被限制在 mT 量级,以避免组织损伤或电磁干扰。然而在这一磁场范围内:
l传统多磁畴(MD)磁性颗粒磁化行为复杂
l磁矩部分相互抵消,低场响应效率低
l需要提高磁填料含量以补偿驱动力
l最终导致材料变脆、不可拉伸、难以打印
l如何在低磁场下提升磁驱效率,成为该领域亟需解决的关键问题。
【核心思路:从“多磁畴”到“单磁畴”】
该工作从磁性材料的磁畴本质出发,选用了粒径约 200–300 nm 的单磁畴 NdFeB 纳米颗粒作为磁响应单元。相较多磁畴颗粒,单磁畴材料具有:
l更高的矫顽力与剩磁
l更稳定、可预测的磁化行为
l在弱磁场下仍能产生有效磁力矩
在此基础上,研究团队构建了 Sd-NdFeB@Au@PAM 核–壳型磁性胶体体系,通过聚丙烯酰胺(PAM)刷状链的氢键网络,实现磁颗粒之间高效的力传递与动态重构。
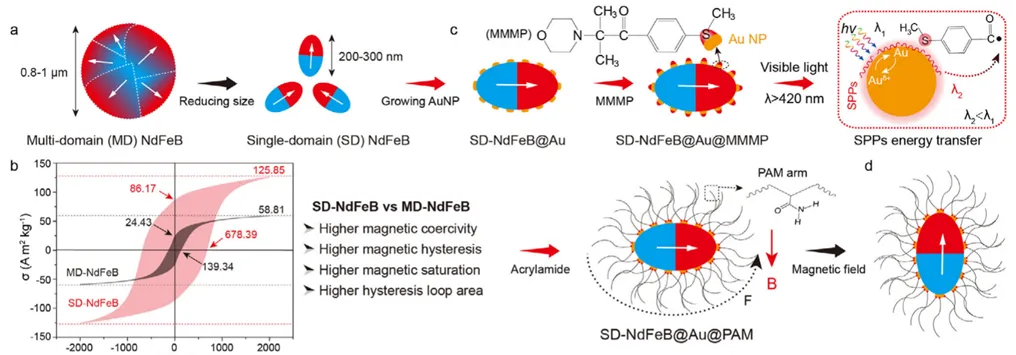
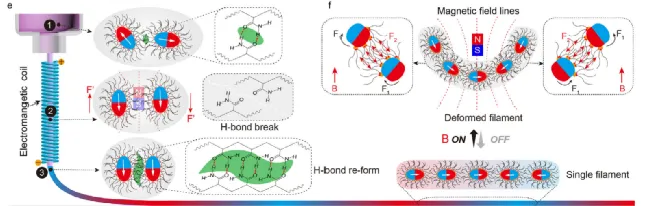
图1 磁驱动微型机器人用Sd-NdFeB@Au@PAM磁性胶体的设计路线。(a)本工作中使用的SD-NdFeB和MD-NdFeB磁性材料示意图。(b)SD-NdFeB和MD-NdFeB的磁滞回线。(c)通过接枝的方法制备NdFeB@Au@PAM磁性胶体的示意图。(d)Sd-NdFeB@Au@PAM的磁性单元能够有效地响应外加磁场。(e)示意图说明了基于挤压的3D打印策略的可编程微型机器人的制造过程。考虑到弱的可逆氢键,界面交联会在剪切力的作用下断裂,挤出后在增强的交联区重新形成。同时,NdFeB@Au@PAM的磁畴结构将沿着喷嘴周围电磁线圈的磁力线定向。(f)说明单个灯丝的磁畴阵列可以通过外部磁场很好地调节的示意图。在外加磁场下,印刷灯丝响应于场线而可逆地呈现相应的变形。除了磁力(F1)外,聚合物臂之间的多重交联会对力传递(F2)提供额外的贡献,以实现增强变形的致动。
【磁场辅助 3D 打印:磁畴的“原位编程”】
研究进一步将上述磁性胶体引入磁场辅助直写 3D 打印(DIW)过程:
l在喷嘴处施加 mT 级磁场
l挤出过程中磁矩沿磁场方向取向
l挤出后通过氢键快速重构,实现磁畴“冻结”
通过改变打印路径和磁场方向,可在单根微米级细丝内实现多磁极区域的精确编程,为复杂变形和运动模式提供结构基础。
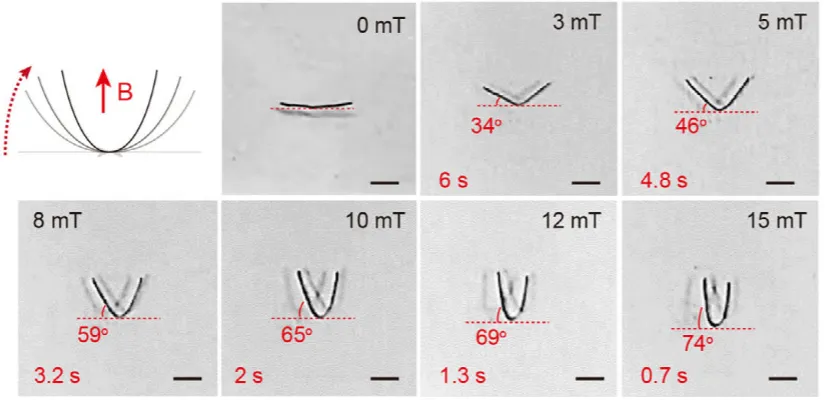
图2 在磁场下随着强度增加而变形的细丝
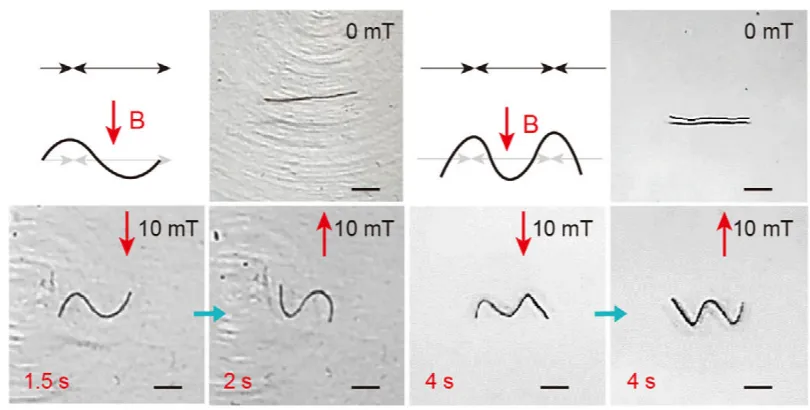
图3 不同磁畴方向打印的细丝以及在 10 mT 交替磁方向下变形的相应实验结果。
【关键性能:低磁含量下的高效响应】
在 NdFeB 含量 低于 2 wt.% 的条件下,该体系仍表现出优异性能:
l驱动磁场:3–15 mT
l最小结构特征尺寸:80 
l最大拉伸应变:1600%
l响应时间:< 1 s
l循环驱动 1000 次几乎无性能衰减
值得注意的是,磁畴取向不仅用于驱动,还显著增强了材料的模量与韧性,超过 90% 的韧性提升来源于磁畴间相互作用与 PAM 网络的协同效应。
【多模态运动与复杂任务展示】
基于可编程磁畴结构,研究团队构建了多种软体微型机器人形态,实现了:
l游动、爬行、翻滚、转向
l上浮 / 下潜等三维运动
l迷宫导航、跨越障碍、载货运输
l微抓手抓取与释放操作
其中,多足微型机器人在 15 mT 磁场下达到约 223 μm/s 的运动速度,在低磁场与低磁含量条件下处于已报道工作的领先水平。
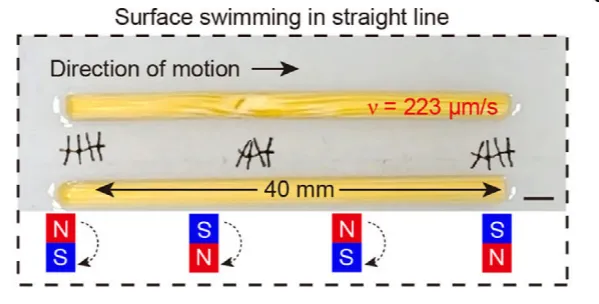
图4 外部磁场下驱动的多足微型机器人运动
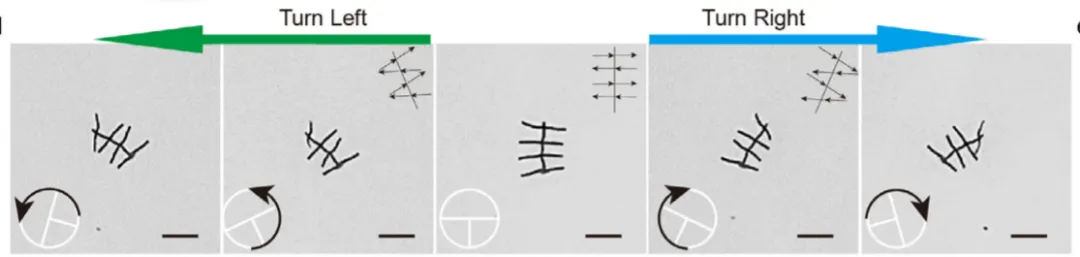
图5 磁场作用下转向在水平方向上的精确运动
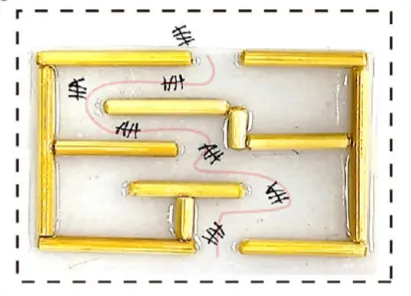
图6 机器人通过一个复杂的迷宫
【自修复与可重构:面向可持续软体机器人】
得益于 PAM 氢键网络与 Au–S 动态键,该体系还具备:
l室温或近红外光诱导的快速自修复能力
l剪切诱导的凝胶–溶胶转变
l破损材料可直接重新打印并重新编程磁畴
这一特性为软体微型机器人的长期服役与循环使用提供了新的可能性。、

图7 自我修复的微型机器人将货物运送到目的地
【总结与展望】
该工作通过单磁畴磁性材料 + 磁畴编程打印的协同设计,成功打破了低磁场驱动条件下磁响应性能与机械性能难以兼顾的传统限制,为磁驱软体微型机器人的材料设计提供了新的思路。
未来,若结合多自由度磁场控制系统与闭环操控策略,该类结构在精准医疗、体内操作及微尺度制造领域具有广阔应用前景。
【论文信息】
题目:Robust and Fast-Transforming Soft Microrobots Driven by Low Magnetic Field
期刊:Advanced Materials
发表时间:2025年6月
DOI:10.1002/adma.202505193

