多旋翼物流无人机节能轨迹规划(Python代码实现)
- 2026-06-24 06:00:09
👨🎓个人主页
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
💥1 概述
多旋翼物流无人机的节能轨迹规划是一项重要的技术,可以有效减少无人机的能量消耗,延长飞行时间,提高物流效率。下面是一些常见的节能轨迹规划方法:
最短路径规划:通过寻找起点和终点之间的最短路径,减少飞行距离,从而节省能量消耗。可以使用经典的最短路径算法如Dijkstra算法和A*算法来实现。
动态路径规划:考虑当前环境的动态变化,比如风速、天气状况和地形高度等因素,并实时优化飞行路径。这样可以避免飞行过程中遭受很大的阻力,从而减少能量消耗。
高效充电站布置:合理规划充电站的位置,使得无人机在物流任务执行过程中可以方便地进行补充能量。这样无人机可以减少回程飞行距离,节省能量。
光伏充电:在无人机上安装太阳能电池板,通过太阳能充电来提供能源。这种方式可以减少对传统电力的依赖,减少碳排放。
多机协同飞行:通过与其他物流无人机进行协同飞行,在空中形成集群,减少空气阻力,提高整体能源利用效率。
节能轨迹规划为多旋翼物流无人机提供了较大的优化空间,通过合理规划飞行路径、优化充电策略以及使用新能源技术,可以显著减少能量消耗,提高物流效率。
本文考虑静态环境下无人机轨迹轨迹的可行性和能耗特性。
多旋翼物流无人机作为现代智能物流系统的重要组成部分,其高效、精确的飞行轨迹规划不仅关系到包裹配送的时效性,还直接影响到无人机的能量消耗与续航能力,进而影响整体运营成本与环境友好度。因此,开展多旋翼物流无人机节能轨迹规划的研究具有极其重要的实践与理论价值。
研究背景
随着电子商务的蓬勃发展和“最后一公里”配送难题的凸显,无人机物流因其快速响应、灵活机动等优点成为了解决方案之一。然而,多旋翼无人机在携带货物飞行时,其能源消耗较大,尤其在面临复杂多变的气象条件、城市复杂的地形环境以及飞行过程中各种不确定因素时,如何设计一条既能保障安全准时送达,又能最大程度减少能耗的飞行路径,成为了研究的焦点。
研究目标
- 最小化能耗
:开发一套基于动态飞行模型的节能飞行策略,考虑风阻、重力等因素对能耗的影响,优化飞行高度、速度及航向,以减少电池消耗。 - 确保安全
:在节能的基础上,确保飞行路径避开禁飞区、人口稠密区和气象恶劣区,同时遵守空域管理规则。 - 提高效率
:综合考虑订单需求的时间窗约束,优化飞行序列,减少等待时间和绕行,提升物流效率。 - 灵活性与适应性
:设计的轨迹规划算法应具有良好的在线调整能力,能够根据实时气象数据、交通状况等动态调整飞行计划。
技术方法
- 模型建立
:建立考虑多旋翼无人机动力学特性、气动阻力及负载效应的飞行能耗模型。 - 优化算法
:采用混合整数线性规划、遗传算法、粒子群优化、强化学习等先进算法,寻求能耗与飞行时间之间的最优平衡。 - 环境感知与预测
:集成GPS、气象传感器、地理信息系统(GIS)等技术,实时获取飞行环境信息,并预测未来一段时间的天气变化,为路径规划提供依据。 - 机器学习
:利用历史飞行数据训练模型,预测飞行过程中的能耗,进一步优化路径规划策略。
实验验证与案例分析
通过仿真平台模拟不同环境条件下的飞行任务,对比传统路径规划与节能轨迹规划方案在能耗、飞行时间、安全性和客户满意度等方面的性能指标。同时,选取典型物流配送案例,进行实地测试验证,收集飞行数据,持续优化算法模型。
多旋翼物流无人机节能轨迹规划的研究不仅能够有效降低运营成本,提升无人机物流系统的可持续性,还能够促进智能物流技术的革新与发展。未来,随着人工智能、大数据技术的不断进步,轨迹规划算法将更加智能化、个性化,更好地服务于智慧城市的构建与绿色物流的发展。
多旋翼物流无人机节能轨迹规划研究
一、多旋翼物流无人机的基本结构与工作原理
多旋翼物流无人机的基本结构包括机架、动力系统(电池、电机、电调、螺旋桨)、飞控系统及配套设备(如遥控器、传感器)。其核心组件如下:
- 机架
:采用轻量化材料(如碳纤维或铝合金)设计,支撑其他部件并影响载重能力和稳定性。 - 动力系统
: - 电机
:无刷电机通过调节转速控制升力,转速与能耗直接相关。 - 螺旋桨
:桨叶设计(如直径、螺距)影响升力和阻力,需与电机匹配以优化效率。 - 电池
:锂聚合物电池因高能量密度被广泛使用,但容量与重量需平衡续航与能耗。 - 飞控系统
:集成陀螺仪、加速度计、GPS等传感器,实时调整飞行姿态并执行轨迹规划。
工作原理:通过调节多个旋翼的转速实现升力、俯仰、横滚和偏航控制。垂直起降(VTOL)能力使其适应复杂环境,但悬停和机动动作会增加能耗。
二、节能轨迹规划的关键技术指标
- 能耗指标
: - 单位距离能耗
(kW·h/km):衡量飞行效率的核心指标,需结合负载、飞行速度及路径复杂度。 - 任务周期能耗
:包括起飞、巡航、避障、降落等阶段的综合能耗。 - 能效优化目标
: 降低飞行阻力(如通过路径规划减少逆风飞行时间)。 减少无效机动动作(如频繁姿态调整)。 - 经济性指标
: 投资收益率(ROI):通过节能降低运营成本,提升物流效率。
三、动力学模型与能耗计算方法
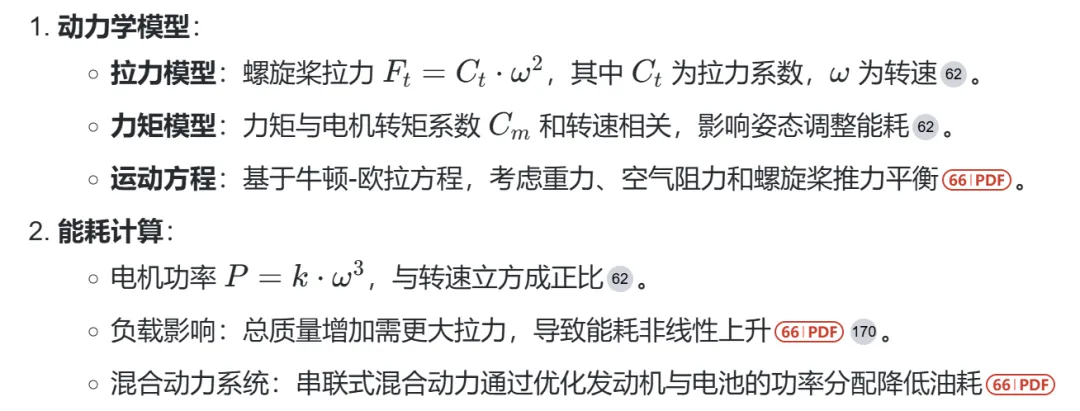 编辑
编辑
四、现有节能轨迹规划算法
- 传统算法
: - 最短路径算法
(Dijkstra、A*):计算简单,但未考虑动态环境和能耗优化。 - 动态规划(DP)
:通过状态空间划分优化全局路径,但计算复杂度高。 - 优化算法
: - 模型预测控制(MPC)
:结合实时环境数据(如风速)调整轨迹,平衡能耗与稳定性。 - 凸优化与神经网络
:通过近似动态模型降低计算量,适合复杂制造环境。 - 混合算法
: - 动态规划+伪谱法(PS)
:在全局预规划基础上实时优化,兼顾能耗与准时性。 - 改进GSO算法
:自适应邻域范围优化多目标轨迹,在铁路运输中验证节能效果。
五、物流场景下的应用案例
- 城市配送
: 动态路径规划避开交通拥堵,减少逆风飞行时间,能耗降低20%。 苏州地铁6号线采用智能环控系统,空调能耗占比从35%降至25%。 - 山区物流
: 纵列式旋翼布局优化机身结构,悬停功率减少6.8%,续航提升15%。 - 零碳园区
: 光伏+储能系统为无人机充电,绿电占比80%,年减碳2450吨130。 零碳物流园区:实现绿色物流的新路径
 编辑
编辑
六、环境约束与挑战
- 物理约束
: - 障碍物与禁飞区
:需结合地理围栏模型(如多边形禁入区检测)生成可行路径。 - 气象条件
:强风或降雨需动态调整飞行高度和速度。 - 性能限制
: - 最小转弯半径
:影响路径平滑度,过小会增加姿态调整能耗。 - 通信延迟
:多机协同任务中需保证实时数据交互,定向天线可降低干扰。
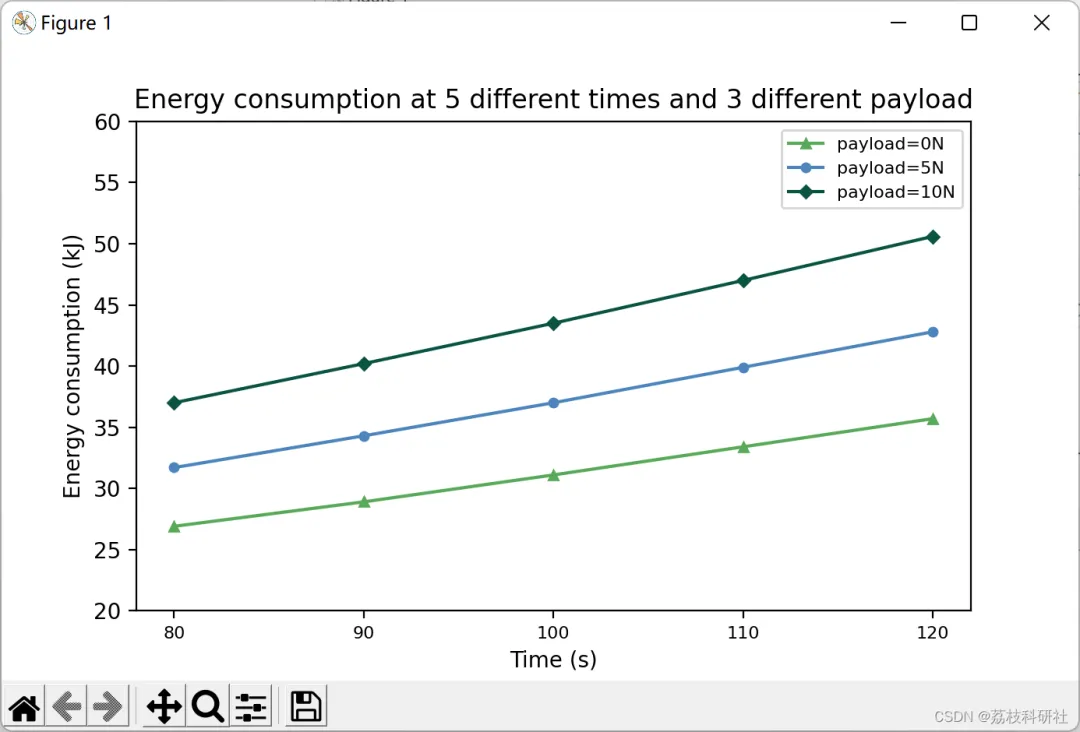
七、不同负载条件下的能耗差异
- 负载与能耗关系
: 载重增加导致旋翼效率下降,但有效质量占比提升可能优化单位能耗。 短时间任务(<1000秒)中,大容量电池可节省燃油;长时间任务因电池重量劣势能耗上升。 - 飞行速度影响
: 中等空速(5-10 m/s)能耗最低,悬停和高速飞行能耗分别增加30%和50%。
八、未来研究方向
- 能源技术
:高能量密度电池与氢燃料电池的应用。 - 智能算法
:量子计算加速复杂轨迹优化,强化学习适应动态环境。 - 多机协同
:异构无人机群任务分配与能耗均衡策略。
📚2 运行结果
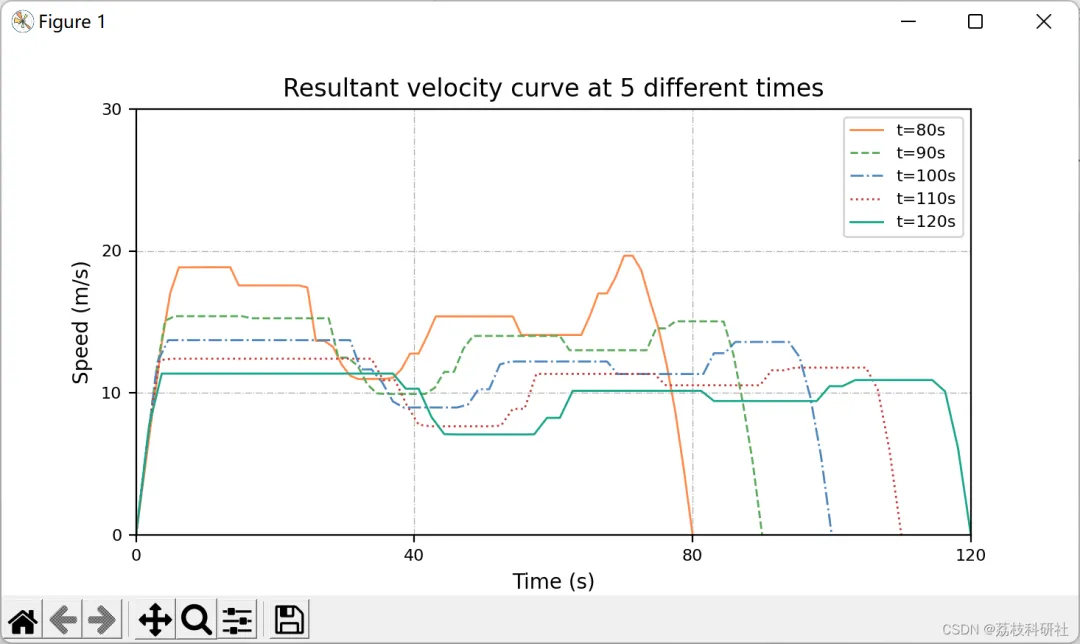 编辑
编辑
 编辑
编辑
 编辑
编辑
部分代码:
def VelDataAboutTime(): blocks = [] b1 = Block(0, 0, 0, 150, 200, 200) # (x1, y1, z1, x2, y2, z2) b2 = Block(100, 150, 120, 300, 400, 450) # (x1, y1, z1, x2, y2, z2) b3 = Block(250, 350, 400, 500, 480, 500) # (x1, y1, z1, x2, y2, z2) b4 = Block(420, 220, 200, 650, 400, 450) # (x1, y1, z1, x2, y2, z2) b5 = Block(550, 80, 150, 650, 400, 300) # (x1, y1, z1, x2, y2, z2) b6 = Block(600, 80, 50, 800, 150, 200) # (x1, y1, z1, x2, y2, z2) blocks.append(b1) blocks.append(b2) blocks.append(b3) blocks.append(b4) blocks.append(b5) blocks.append(b6) block2Ds = [] for b in blocks: block2Ds.append(Block2D(b.x1, b.y1, b.x2, b.y2)) goal = [800, 100, 60] c_x = [] # 每段 (x1, x2) c_y = [] # 每段 (y1, y2) c_z = [] # 每段 (z1, z2) corridor = [] for block in blocks: c_x.append([block.x1, block.x2]) # 提取出每一段的 (x1,x2) c_y.append([block.y1, block.y2]) # 提取出每一段的 (y1,y2) c_z.append([block.z1, block.z2]) # 提取出每一段的 (z1,z2) corridor.append(c_x) corridor.append(c_y) corridor.append(c_z) time = [ [13, 21, 9, 12, 12, 13], [16, 23, 10, 13, 13, 15], [18, 25, 11, 15, 15, 16], [20, 27, 13, 16, 16, 18], [22, 29, 14, 18, 18, 19] ] # time = [13, 21, 9, 12, 12, 13] # 80 2.68677585e+04 # time = [16, 23, 10, 13, 13, 15] # 90 2.88795396e+04 # time = [18, 25, 11, 15, 15, 16] # 100 3.10684295e+04 # time = [20, 27, 13, 16, 16, 18] # 110 3.33565508e+04 # time = [22, 29, 14, 18, 18, 19] # 120 3.57001138e+04 for i in range(5): print("============================================") energy, power, s, vel = UAV3D(time[i], goal, corridor) print(energy) """ save vel to excel """ vel_x = list(np.array(vel[0]).flatten()) vel_y = list(np.array(vel[1]).flatten()) vel_z = list(np.array(vel[2]).flatten()) for index in range(len(vel_x)): velocity = math.sqrt(vel_x[index] ** 2 + vel_y[index] ** 2 + vel_z[index] ** 2) CVXsheet.write(index, i, velocity) workbook.save('Velocity.xls') def plot_blocks(blocks): plt.figure(1) ax = plt.axes(projection='3d') 发光太阳聚光器的蒙特卡洛光线追踪研究(Matlab代码实现)ax.set_xlabel('X(m)') ax.set_ylabel('Y(m)') ax.set_zlabel('Z(m)') # ax.set_xticks(np.linspace(0, 100, 4)) # ax.set_yticks(np.linspace(0, 100, 4)) # ax.set_zticks(np.linspace(0, 100, 4)) ax.set_xlim(0, 1000) ax.set_ylim(0, 1000)
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]陈雯雯.小型四旋翼无人机轨迹规划算法研究[D].青岛理工大学,2015.DOI:10.7666/d.Y2818815.
[2]王凯平.复杂城市空间环境中的无人机轨迹规划方法与应用研究[J].[2024-07-03].
[3]吴成振,孙大运.多约束条件下的无人机轨迹快速规划[J].农业装备与车辆工程, 2021.DOI:10.3969/j.issn.1673-3142.2021.03.028.
🌈4 Python代码实现
公众号后台回复:程序下载

