机器人界「Linux」真要来了?!开源 DimOS 爆火,想把人形机器人、无人机和机器狗塞进一套框架
导读
有人把“机器人统一开发层”做成了开源项目,最近几天直接在 GitHub 和 X 一起刷屏。这个叫DimOS的框架,已经拿到2084 Stars、316 Forks、23 位贡献者,还把人形机器人、机器狗、无人机、机械臂、MCP、MuJoCo 仿真、数据回放全塞进同一套 Python-first 工作流里。更刺激的是,它想让 Cursor、Claude Code、OpenClaw 直接把手伸进物理世界。先别眨眼,AI 圈这次盯上的,是机器人入口
这波传播最凶的一句话,非常像为朋友圈准备的标题党。
"Someone just open sourced an operating system for robots. Any robot. One framework."
「有人刚刚把一个给机器人的操作系统开源了。任何机器人。一个统一框架。」
短短三句,直接把情绪点拉满。
机器人。开源。统一框架。自然语言控制。再加上“Cursor 和 Claude Code 能直接接进来”,这套叙事几乎就是给 2026 年 AI 圈量身定做的。于是,Nav Toor 这条转述帖很快冲到近 4 万浏览、700 多赞、近千收藏。大家转的,根本不只是一个仓库链接,而是一种更让人兴奋的想象:AI agent 终于可以从浏览器里爬出来,去碰真实世界了。
▲ Nav Toor 把 DimOS 概括成“任何机器人的开源操作系统”,截至抓取时拿到约 763 赞、969 收藏、近 4 万浏览
最狠的地方还在后面。
这条帖把 DimOS 描述成一个能统一人形机器人、四足机器狗、无人机、机械臂的框架,还强调一句特别容易传播的话:“你只要打一句 move forward 1 meter,机器人就会动。”
你以为这只是社交媒体夸张包装?有包装成分,当然有。但它也确实踩中了今天技术圈最敏感的神经:大家已经厌倦 agent 只会发邮件、订日历、点网页了。所有人都在等一个真正能把 AI 接到物理空间的接口。
真正让 DimOS 可怕的,是它把入口做顺了
官方给自己的定义非常直接:The Agentive Operating System for Physical Space。
"With a simple install and no ROS required, build physical applications entirely in python that run on any humanoid, quadruped, or drone."
「一次简单安装、无需 ROS,就能用纯 Python 构建可运行在 humanoid、四足和无人机上的物理世界应用。」
光看这句话,你就知道团队在打哪一层。
他们想拿掉的,是机器人开发里最劝退人的那一层复杂度:环境折腾、硬件适配、仿真切换、控制胶水代码、agent 接口碎片化。DimOS 的招数很简单,但很致命——把 blueprint、transport、CLI、MCP、simulation、replay、memory 这些原本分散的模块,打包成同一条工作流。
更关键的是,它不是把 agent 当“外挂插件”挂上去。官方 release note 直接写了:
"DimOS is now built to be driven by coding agents. Point OpenClaw, Claude Code, or Cursor at AGENTS.md..."
「DimOS 现在已经被设计成可以直接由 coding agents 驱动。把 OpenClaw、Claude Code、Cursor 指向 AGENTS.md,它们就能直接上手。」
这就很不一样了。
过去的机器人软件栈,核心思路是“先把硬件和控制跑起来,再想办法把 AI 接上去”。DimOS 现在给出的姿势,是从第一天就把 agent 当成系统的一等公民。这一步一旦走通,开发门槛会被削掉一大块,传播势能也会瞬间放大。
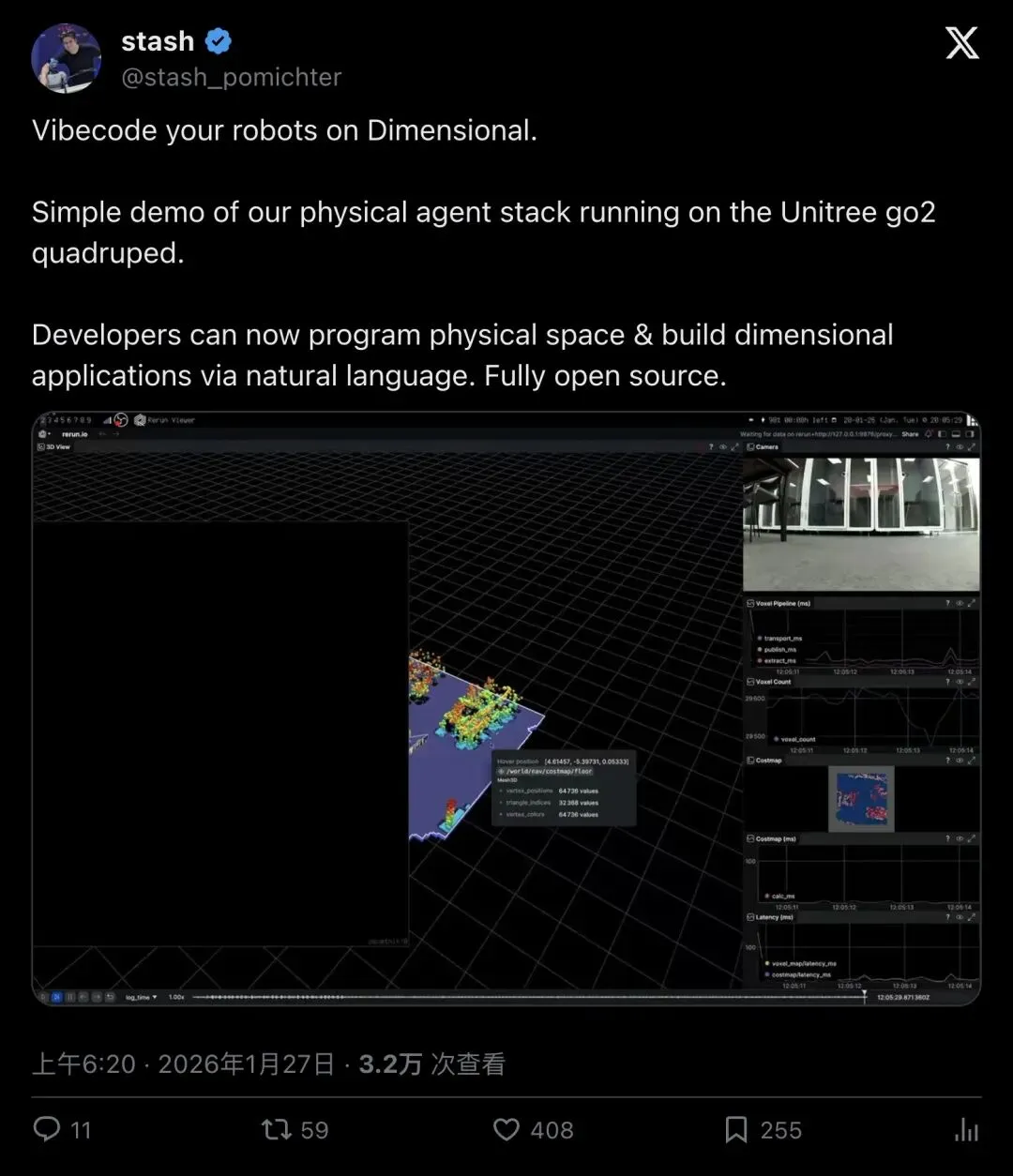
▲ 项目核心传播账号 stash 在 1 月就开始打出 “Vibecode your robots on Dimensional”,截至抓取时约 408 赞、255 收藏
它想统一的,到底是什么
很多人一看到“机器人 Linux”,下意识就会脑补成底层内核、行业标准、跨厂商统一平台,仿佛一个时代已经落地。
先冷静一下。
DimOS 现在还在 README 里明确标着 Pre-Release Beta。它离“行业底座”这四个字,还有不短的路。
但它的野心,确实已经写在结构里了。
从官方文档和 release 信息交叉看,DimOS 试图统一的是这几层:
- 统一开发接口:用 Python-first 的方式写机器人应用
- 统一运行方式:同一套 blueprint 可以跑在真机、MuJoCo 仿真、replay 数据三种模式
- 统一 agent 接口:可以通过 CLI、daemon、MCP 去发现和调用能力
- 统一 transport 抽象
- 统一硬件叙事
这才是它真正让人上头的地方。
它要解决的,并非“所有机器人长得一样”这种问题。它盯上的,是开发者如何用同一套方式,把感知、仿真、控制、记忆、agent 调用接到一起。谁先把这件事做顺,谁就有资格吃下机器人时代的开发者入口。
当然,传播层的话术比官方更猛。像 Khairallah 这样的技术向转述帖,会把硬件名单、SLAM、MuJoCo、纯 Python ROS messages 一口气全抛出来,看着非常炸。
▲ Khairallah 的转述更偏工程视角,强调 SLAM、仿真和纯 Python 能力,截至抓取时约 99 赞、98 收藏
但这里有个很重要的分界线,写稿时一定要守住:传播帖会把能力说满,官方矩阵则给了成熟度标签。
截至本次抓取,README 里能直接确认的是:
- Stable
- Beta
- Alpha
- 机械臂方向已经出现 xArm7 相关 command 和 blueprint 痕迹
也就是说,DimOS 的故事是真的,进度也是真的,但“已经支持任何机器人”这种说法还太满。真正靠谱的表达应该是:它已经把多类机器人塞进同一套抽象层,并且开始跑出不同成熟度的落地路径。
这不是 PPT 项目,它已经连续迭代了好几轮
很多爆红项目的问题,根本不在于概念,而在于打开仓库以后只剩一个 README。
DimOS 这次不太一样。
它的 GitHub repo 创建于2024 年 10 月。到这波出圈时,已经滚到11 个 tag / release。时间线也很清楚:
- 2026-01-23:v0.0.8,开始出现 Unitree Go2 navigation pre-release patch
- 2026-02-20:v0.0.10,补上manipulation、MuJoCo simulation、DDS transport、visualization
- 2026-03-12:v0.0.11,进一步强化agent-native、interactive visualizer、drones、temporal memory、fleet control
这说明它的爆红,不是突然被某个大号一口奶起来。
更像是团队先把底层架子一层层搭起来,等到外界终于能听懂它在讲什么,传播才瞬间放大。你今天看到的“机器人 Linux”热搜感,背后其实是一整段工程堆出来的时间差。
最能说明问题的,是 builder 侧的演示。像 Ruthwik Dasyam 发的这条 VR teleoperation demo,展示的是MuJoCo 里的实时控制 + 仿真闭环。这类内容的说服力,和二手转述不是一个量级。
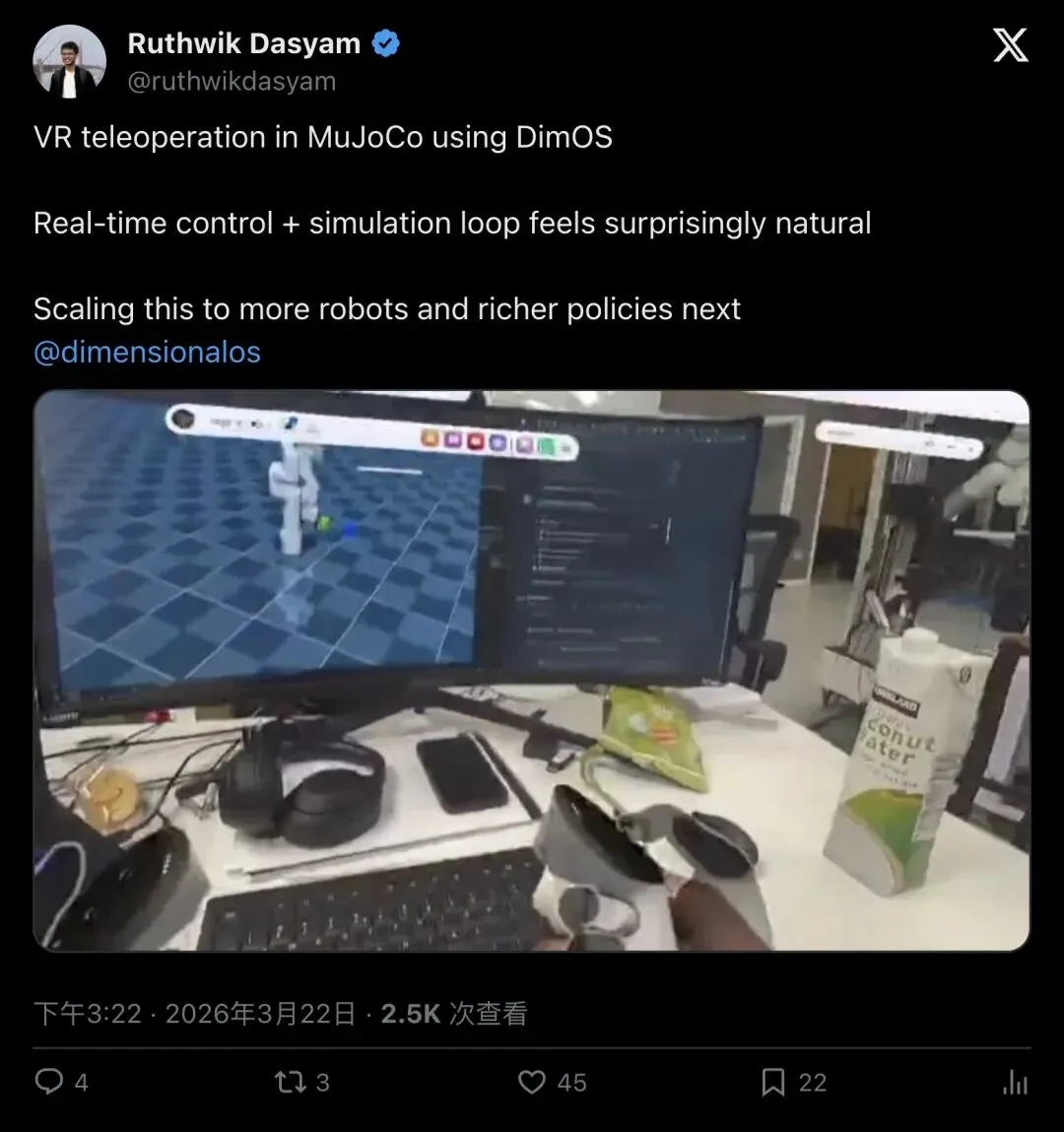
▲ Ruthwik Dasyam 展示用 DimOS 做 VR teleoperation in MuJoCo,截至抓取时约 45 赞、22 收藏
再往前翻,stash 在 1 月中旬就已经提前预热“The first agentive robot navigation stack”。这说明团队压根不是最近两周才开始想故事,他们是在很早以前就把“agentive robot”这套心智往外打了。

▲ stash 在 1 月 12 日就开始预热 agentive robot navigation stack,这条帖拿到约 2000 赞、15 万浏览
这才是最值得警惕的地方:有些项目先做营销,再补产品;DimOS 这波更像先把产品骨架做出来,再被传播层识别出叙事价值。
为什么 AI 圈会突然这么兴奋
因为它把一句大家已经说烂了的话,第一次变得具体了。
过去一年,所有人都在讲“AI agent 会进入物理世界”。问题是,怎么进?靠什么进?哪条链路进?绝大多数讨论一到这里就开始飘。
DimOS 给出的答案很具体:
- 让 agent 能通过CLI / MCP发现和调用物理世界能力
- 让机器人任务先在simulation / replay里验证,再推到真机
- 让感知、导航、记忆、控制都被塞进同一个 runtime 里
- 让开发者可以用今天已经熟悉的 AI 工具链,直接操作机器人系统
所以 Wes Roth 那句总结,传播力才会这么强:
"Dimensional provides the bridge to the physical world."
「Dimensional 提供了 AI 通往物理世界的桥。」
这句话之所以好,是因为它没有陷进技术细节,却把这波情绪说透了。
▲ Wes Roth 把 DimOS 定义为 AI agent 通往物理世界的桥,截至抓取时约 41 赞、4.4K 浏览
说白了,大家兴奋的,从来不只是“又一个开源机器人项目”。
大家兴奋的是:AI agent 终于开始拥有自己的“物理世界接线板”了。
所以,机器人界的「Linux」真的来了?
这个标签会继续飞,而且还会越飞越高。
原因很简单:它太好传播了。谁都听得懂,谁都能转述,谁都能顺手再加一句“以后写一句话就能指挥机器人”。这套叙事天然带流量。
但如果把热度压平,回到工程现场,你会看到另一层更值得关注的东西。
DimOS 当前最重要的价值位,落在“统一开发层”这个入口上。
它还不是行业标准。它还在 Pre-Release Beta。它对不同硬件的成熟度差异非常明显。它和 Linux 之间,也隔着一整套生态、驱动、标准、分发体系的长期积累。
可它已经做成了一件很关键的事:让“AI agent 控制机器人”从一句空话,变成了一条看得见、摸得着、开始能跑通的开发路径。
这就够危险了。
因为接下来真正可能被统一的,未必是机器人本身。
更可能先被统一的,是开发者进入物理世界的默认工作流。
一旦这件事跑顺,今天的“机器人 Linux”还只是标题;明天争夺的,就会是整个 embodied AI 时代的入口。
— END —
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
