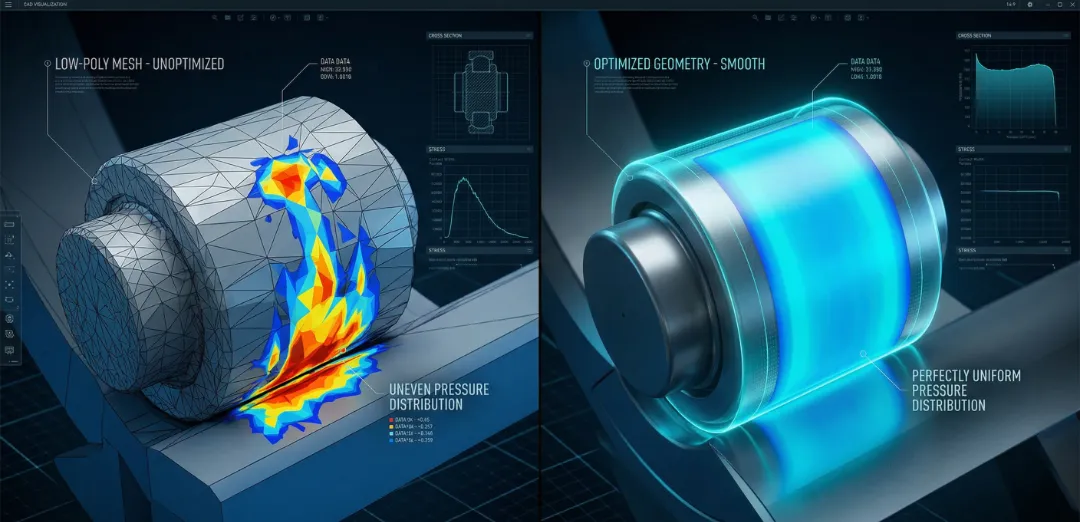
在有限元的世界里,"所见非所得"。你在 CAD 里画的是完美的圆弧,但在计算引擎眼里,它只是一堆平直的单元刻面(Facets)。这种"几何失真"是接触分析中的头号杀手:它会产生虚假的压力波动,甚至让接触算法在棱角处"卡死"。
为了不增加网格密度(那太费算力了!),Abaqus 提供了一个黑科技:表面平滑(Surface Smoothing)。通过 Python API,我们可以给这些棱角分明的表面涂上一层"数字粉底",让它们在接触计算时恢复原有的丝滑曲线。
为什么需要表面平滑?
在有限元分析中,几何模型和网格模型之间存在本质差异:
这种离散化带来的问题在接触分析中尤为突出:
虚假应力集中:单元棱角处产生非物理的高应力
接触振荡:接触点在相邻单元间"跳跃",导致力波动
收敛困难:接触算法在棱角处难以找到稳定解
结果失真:接触压力和摩擦力分布完全不可信
表面平滑的本质是在接触计算时,用数学公式"欺骗"求解器,让它"以为"表面是光滑的,而不是棱角分明的。这是一种"算法层面的几何修复"。
这意味着:
接触计算使用的是"虚拟"的光滑表面
内部求解仍然基于原始网格
不增加自由度,不改变刚度矩阵
根据官方脚本指南,SmoothingAssignment 对象并不需要你手动去 Create,它静静地躺在 Interaction 对象的属性库里,等着你去 append(追加)或 change(修改)。
适用对象: 圆柱体、圆锥体、回转面。
这就是给你的模型装上了一个虚拟的"车床"。它会告诉接触算法:"别看这儿是一排直线,其实它是一个完美的圆周。"对于模拟轴承转动、活塞滑动,这是必选滤镜。
实战案例:轴承滚子接触分析
from abaqus import *from abaqusConstants import *def setup_bearing_smoothing(model_name): """ 为轴承接触设置 REVOLUTION 平滑 场景:圆柱滚子轴承,内外圈和滚子都是旋转体 """ model = mdb.models[model_name] # 获取通用接触对象 gnl_contact = model.interactions['Bearing_General_Contact'] # 为旋转体分配平滑(假设几何已对齐 Z 轴) gnl_contact.smoothingAssignments.appendInStep( stepName='Loading-Step', assignments=( ('Inner-Race-Surface', REVOLUTION), # 默认绕 Z 轴平滑 ('Outer-Race-Surface', REVOLUTION), ('Roller-Surface', REVOLUTION), ) ) print("轴承旋转体平滑已设置") print(" - 内圈:REVOLUTION") print(" - 外圈:REVOLUTION") print(" - 滚子:REVOLUTION")# 使用示例setup_bearing_smoothing('Bearing-Model')
REVOLUTION 的注意事项:
1. 旋转轴方向:确保几何的旋转轴与 Abaqus 的坐标系一致
2. 母线定义:复杂的回转面可能需要分段定义
3. 端面处理:旋转体的端面(垂直于轴的面)不适合 REVOLUTION
4. 组合使用:可以与其他平滑类型组合使用
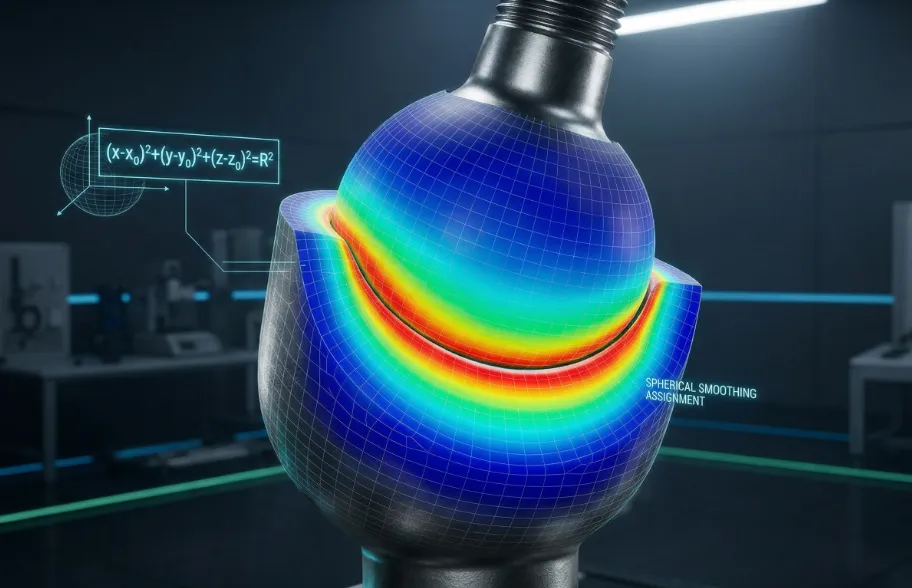
适用对象: 球头、球窝、万向节。
无论你的网格画得多么像"我的世界(Minecraft)",只要贴上 SPHERICAL 标签,它在接触瞬间就会变成一颗圆滑的珍珠。
实战案例:球铰关节接触分析
def setup_ball_joint_smoothing(model_name): """ 为球铰关节设置 SPHERICAL 平滑 场景:汽车悬挂系统的球铰关节 """ model = mdb.models[model_name] # 获取通用接触对象 gnl_contact = model.interactions['Joint_General_Contact'] # 为球头和球窝分配 SPHERICAL 平滑 gnl_contact.smoothingAssignments.appendInStep( stepName='Motion-Step', assignments=( ('Ball-Head-Surface', SPHERICAL), # 球头 ('Ball-Socket-Surface', SPHERICAL), # 球窝 ) ) print("球铰关节平滑已设置") print(" - 球头:SPHERICAL") print(" - 球窝:SPHERICAL")# 使用示例setup_ball_joint_smoothing('Suspension-Model')
SPHERICAL 的特殊应用:
除了标准的球面,SPHERICAL 还可以用于:
局部球面:任何近似球面的区域
多球拟合:复杂曲面可以用多个球面分段拟合
球冠/球缺:不完整的球面区域
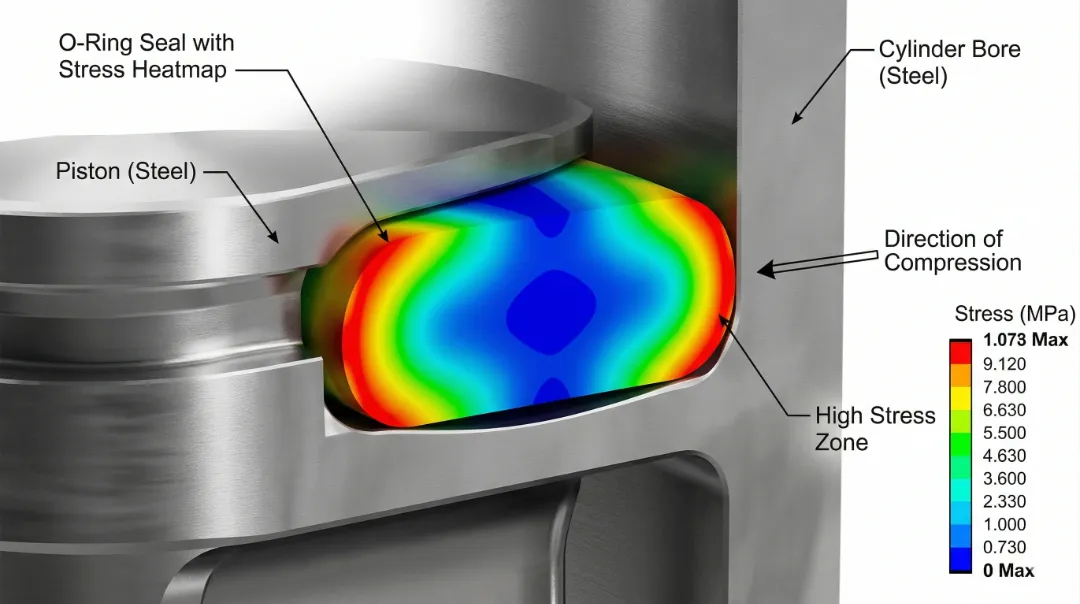
适用对象: 密封圈(O-Ring)、轮胎内胎。
这种滤镜最复杂,因为它要同时照顾两个方向的圆弧。只有 TOROIDAL 能精准识别出这种"环形美",防止密封圈在受压时因为网格棱角而产生虚假的应力集中。
实战案例:O型圈密封分析
def setup_o_ring_smoothing(model_name): """ 为 O 型圈设置 TOROIDAL 平滑 场景:液压系统的 O 型圈密封 """ model = mdb.models[model_name] # 获取通用接触对象 gnl_contact = model.interactions['Seal_General_Contact'] # 为 O 型圈表面分配 TOROIDAL 平滑 gnl_contact.smoothingAssignments.appendInStep( stepName='Compression-Step', assignments=( ('O-Ring-Outer-Surface', TOROIDAL), # O 型圈外表面 ('O-Ring-Inner-Surface', TOROIDAL), # O 型圈内表面(如果有) ) ) print("O 型圈平滑已设置") print(" - 外表面:TOROIDAL") print(" - 内表面:TOROIDAL")# 使用示例setup_o_ring_smoothing('Hydraulic-Seal')
TOROIDAL 的识别要点:
1. 主半径 R:圆环的中心线半径
2. 次半径 r:圆环的截面半径
3. 方向性:圆环的朝向(水平/垂直)
4. 完整性:可以是完整圆环或部分圆环
默认状态: 不进行任何平滑。
适用场景: 原本就是方方正正的零件。有些地方,棱角就是它的灵魂,强行磨皮反而会失真。
什么时候选择 NONE?
1. 本来就是平面:方块、平板等
2. 棱边需要保留:刀具、齿轮齿形等
3. 精度要求不高:初步分析或概念验证
4. 特殊几何:无法归类为旋转体、球面或圆环面
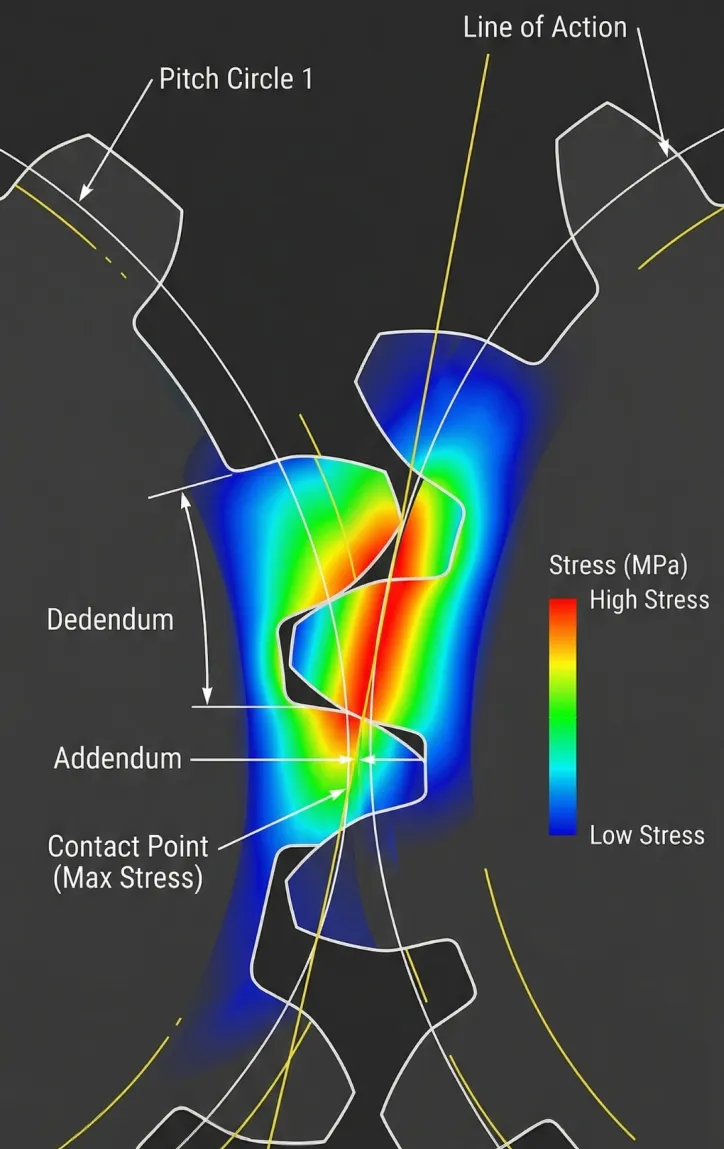
实战案例:齿轮啮合分析
def setup_gear_contact(model_name): """ 为齿轮接触设置平滑 场景:齿轮啮合,齿顶圆用 REVOLUTION,齿形用 NONE """ model = mdb.models[model_name] # 获取通用接触对象 gnl_contact = model.interactions['Gear_Contact'] # 为不同区域分配不同的平滑类型 gnl_contact.smoothingAssignments.appendInStep( stepName='Rotation-Step', assignments=( ('Gear-Addendum-Surface', REVOLUTION), # 齿顶圆:旋转体 ('Gear-Dedendum-Surface', REVOLUTION), # 齿根圆:旋转体 ('Gear-Tooth-Flank', NONE), # 齿形:保持棱角 ) ) print("齿轮接触平滑已设置") print(" - 齿顶圆:REVOLUTION") print(" - 齿根圆:REVOLUTION") print(" - 齿形:NONE(保持精确齿形)")# 使用示例setup_gear_contact('Gear-Transmission')
由于 SmoothingAssignment 是分配给 ContactStd(通用接触)或 ContactExp 对象的一个属性,我们需要通过 `appendInStep` 方法来生效:
from abaqus import *from abaqusConstants import *# 1. 获取已有的通用接触对象# 假设我们已经创建了一个名为 'General_Contact' 的交互gnlContact = mdb.models['Model-1'].interactions['General_Contact']# 2. 给指定的表面分配"磨皮"滤镜# index 用于指定第几个分配规则# value 里的内容是 (平滑类型,) # 注意:SmoothingAssignment 接受的是元组嵌套gnlContact.smoothingAssignments.appendInStep( stepName='Step-1', assignments=( ('Part-1-Surface', SPHERICAL), # 给球头表面磨皮 ('Part-2-Cylinder', REVOLUTION) # 给轴套表面磨皮 ))
这一招在通用接触(General Contact)里极其好用!
`index` 参数很重要,如果你想修改现有的平滑规则,记得用 `changeValuesInStep(stepName, index, value)`。
四种平滑类型的选择决策树:
开始│├─ 表面是球面或近似球面?│ ├─ 是 → 使用 SPHERICAL│ └─ 否 → 继续下一步│├─ 表面是旋转体(圆柱/圆锥)?│ ├─ 是 → 使用 REVOLUTION│ └─ 否 → 继续下一步│├─ 表面是圆环面(O型圈/轮胎)?│ ├─ 是 → 使用 TOROIDAL│ └─ 否 → 继续下一步│└─ 使用 NONE(保持原始网格)
完整的平滑分配管理:
def manage_smoothing_assignments(model_name, contact_name): """ 管理通用接触的平滑分配 包含:添加、修改、删除平滑分配 """ model = mdb.models[model_name] contact = model.interactions[contact_name] # 方法 1:添加新的平滑分配 def add_smoothing(): contact.smoothingAssignments.appendInStep( stepName='Loading-Step', assignments=( ('Surface-A', REVOLUTION), ('Surface-B', SPHERICAL), ('Surface-C', TOROIDAL), ) ) print(" 平滑分配已添加") # 方法 2:修改现有的平滑分配 def modify_smoothing(): # 修改索引为 0 的分配规则 contact.smoothingAssignments.changeValuesInStep( stepName='Loading-Step', index=0, value=(('Surface-A', NONE),) # 改为不平滑 ) print(" 平滑分配已修改") # 方法 3:删除所有平滑分配 def clear_smoothing(): # 获取当前的平滑分配 current_assignments = contact.smoothingAssignments.valuesInStep( stepName='Loading-Step' ) # 逐个删除 for i in range(len(current_assignments)): contact.smoothingAssignments.delete( stepName='Loading-Step', index=0 # 每次删除索引 0,后面的会自动前移 ) print(" 所有平滑分配已清除") # 方法 4:查询当前的平滑分配 def query_smoothing(): assignments = contact.smoothingAssignments.valuesInStep( stepName='Loading-Step' ) print("\n当前平滑分配:") print("-" * 50) for i, (surface, smoothing_type) in enumerate(assignments): type_name = { REVOLUTION: 'REVOLUTION', SPHERICAL: 'SPHERICAL', TOROIDAL: 'TOROIDAL', NONE: 'NONE' }.get(smoothing_type, 'UNKNOWN') print(f"{i}: {surface} -> {type_name}") print("-" * 50) return { 'add': add_smoothing, 'modify': modify_smoothing, 'clear': clear_smoothing, 'query': query_smoothing }# 使用示例manager = manage_smoothing_assignments('Model-1', 'General_Contact')manager['add']() # 添加平滑manager['query']() # 查询当前分配manager['modify']() # 修改分配manager['clear']() # 清除所有分配
在 Abaqus 脚本建模中,SmoothingAssignment 是一种"高性价比"的优化手段。
它没有增加一个节点,也没有改变单元的刚度,它只是在接触力的传递过程中,用数学公式抹平了网格的褶皱。有时候,解决硬核问题不需要"硬刚"(加网格),只需要一点点算法的"温柔"(平滑处理)。
SmoothingAssignment 设置检查清单:
识别几何特征(旋转体/球面/圆环面/其他)
选择合适的平滑类型
确认表面名称正确
在正确的分析步中分配
验证平滑效果(检查接触应力分布)
对比平滑前后的结果差异
必要时组合使用多种平滑类型
最佳实践建议:
先分析后平滑:先运行不加平滑的分析,观察问题区域
局部优先:只对问题区域应用平滑,不要全局使用
逐步验证:每次只改一处,验证效果后再继续
组合使用:复杂几何可以分段使用不同平滑类型
结果对比:保存平滑前后的结果,量化改善效果
👉互动话题:在你的仿真中,有没有遇到过因为网格太粗,导致接触应力云图看起来像"马赛克"的情况?你是选择"暴力增加网格",还是尝试过这种"平滑黑科技"?评论区聊聊你的看法!




 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
