在前两篇推送中,我们先后掌握了哈里斯角检测和Shi-Tomasi拐角探测器,解锁了角点提取的基础技巧,但也发现了一个核心局限:无论是哈里斯还是Shi-Tomasi,都对尺度变化敏感——同一目标,放大或缩小后,角点检测效果会大幅下降,甚至无法检测到目标。而今天要讲的SURF(加速鲁棒特征),正是为解决这个问题而生,它是SIFT特征的优化升级版本,兼具“尺度不变性、旋转不变性、鲁棒性”,且计算速度更快,是实际项目中(图像匹配、全景拼接、目标识别)最常用的高级特征提取算法之一。
很多新手学习SURF时,容易被“加速鲁棒”“尺度不变”等专业术语吓住,也会疑惑:SURF和SIFT、Shi-Tomasi有什么区别?为什么它能解决尺度敏感问题?OpenCV中如何调用SURF算法?今天这篇实操教程,就带大家彻底吃透SURF特征——从核心原理、与前序算法的对比,到OpenCV实操、参数调优、场景落地,全程避开晦涩理论,紧密衔接前文角点检测知识点,让新手既能快速上手实操,也能理解背后的核心逻辑,实现从基础角点提取到高级特征提取的跨越。
一、前置基础:先搞懂——SURF是什么?(衔接前序算法)
SURF(Speeded Up Robust Features,加速鲁棒特征),是2006年由Herbert Bay等人提出的一种高级特征提取算法,本质是对SIFT(尺度不变特征变换)算法的优化——它保留了SIFT的“尺度不变性、旋转不变性”核心优势,同时通过简化计算流程、引入积分图像,将计算速度提升了3倍以上,解决了SIFT算法计算耗时的问题,更适配实际项目的实时性需求。
结合前序知识点,我们用一句话理清SURF与Shi-Tomasi、SIFT的关系:Shi-Tomasi/哈里斯是基础角点检测,无尺度不变性;SIFT是首个具备尺度不变性的特征算法,但计算慢;SURF是SIFT的加速版,兼顾尺度不变性、鲁棒性和速度,三者的核心差异的是“是否支持尺度不变”和“计算效率”。
关键补充(新手重点记):
•尺度不变性:同一目标,无论放大、缩小,都能精准检测到其特征点(解决Shi-Tomasi/哈里斯的核心局限);
•旋转不变性:目标旋转后,特征点检测结果不受影响(与SIFT、Shi-Tomasi一致);
•鲁棒性:对光照变化、噪声、视角变化有较强的容忍度,适配复杂实际场景(优于前序所有算法);
•加速核心:通过“积分图像”简化卷积计算,减少运算量,比SIFT快3倍以上,适合实时处理。
举个通俗例子:用Shi-Tomasi检测一张“原尺寸的棋盘”,能精准找到角点,但如果将棋盘放大2倍,再用Shi-Tomasi检测,会出现大量漏检、误检;而用SURF检测,无论棋盘是原尺寸、放大还是缩小,都能精准找到对应的特征点——这就是尺度不变性的核心价值。
二、核心原理:SURF为什么能实现“加速+鲁棒”?(通俗版)
SURF的核心原理与SIFT类似,都是通过“构建尺度空间、检测特征点、描述特征点”三个步骤实现尺度不变性,但SURF通过两个关键优化,实现了“加速”和“鲁棒性提升”,新手无需深究复杂的数学推导,抓住以下简化流程和核心优化点即可。
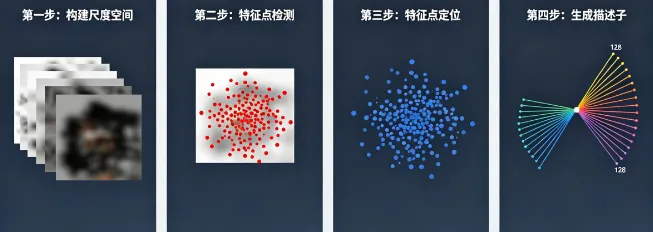
1. SURF核心流程(简化版,新手必记)
1.构建尺度空间:用不同尺寸的高斯滤波器对图像进行平滑处理,得到不同尺度的图像(模拟目标的放大、缩小),从而检测不同尺度下的特征点;
2.特征点检测:在尺度空间中,通过“海森矩阵(Hessian)”计算每个像素的响应值,筛选出响应值大于阈值的特征点(类似角点检测,但支持多尺度);
3.特征点定位:对筛选出的特征点进行精确定位,去除边缘点和冗余点,保留稳定的特征点;
4.特征点描述:为每个特征点生成一个“特征描述子”(128维或64维向量),用于后续的特征匹配(描述子能唯一标识特征点,不受尺度、旋转影响)。
2. 核心优化点(SURF vs SIFT,加速+鲁棒的关键)
•加速优化:用“积分图像”替代SIFT中的高斯卷积,将卷积计算的时间复杂度从O(n²)降至O(1),计算速度提升3倍以上;
•鲁棒性优化:用“海森矩阵”替代SIFT中的差分高斯,对边缘特征的检测更精准,同时对光照变化的容忍度更高;
•描述子优化:SURF的特征描述子更简洁(可选择64维,SIFT为128维),既减少了计算量,又保证了匹配精度。
关键提醒:OpenCV中SURF属于“专利算法”,部分OpenCV版本(如4.5.0以上)默认不启用,需手动安装扩展包或使用特定版本,后续实操会详细说明环境配置方法,避免新手踩坑。
三、环境准备(重点解决SURF专利问题,新手必看)
由于SURF是专利算法,OpenCV官方版本(如4.5.0以上)默认不包含SURF相关函数,需通过安装OpenCV扩展包(opencv-contrib-python)来启用,环境配置与前序一致,仅需额外安装扩展包,步骤如下:
1. 环境安装命令(适配Python 3.7-3.12,全系统兼容)
python# 卸载原有OpenCV(若已安装,避免版本冲突)pip uninstall opencv-python opencv-contrib-python -y# 安装适配版本(推荐4.4.0.46,无专利限制,支持SURF)pip install opencv-python==4.4.0.46pip install opencv-contrib-python==4.4.0.46# 安装辅助库(与前序一致,无需重复安装)pip install numpy matplotlib |
2. 环境验证(确保SURF可正常使用)
pythonimport cv2# 验证OpenCV版本print("OpenCV版本:", cv2.__version__)# 验证SURF可调用try:surf = cv2.xfeatures2d.SURF_create()print("SURF环境配置成功!")except Exception as e:print("SURF环境配置失败,错误信息:", e)print("请重新安装指定版本:pip install opencv-contrib-python==4.4.0.46") |
关键说明:若运行后提示“SURF环境配置成功”,则可正常进行后续实操;若失败,大概率是版本不兼容,严格按照上述命令安装4.4.0.46版本即可解决(该版本无专利限制,新手首选)。
四、核心重点:SURF核心函数详解(必记)
OpenCV中SURF的核心函数都封装在cv2.xfeatures2d模块中,主要包括“创建SURF对象、检测特征点、计算描述子”三个核心函数,新手重点掌握这三个函数的用法,即可完成SURF特征提取。
1. 核心函数(3个,必记)
python# 1. 创建SURF对象(核心)cv2.xfeatures2d.SURF_create(hessianThreshold, nOctaves, nOctaveLayers, extended, upright)# 2. 检测特征点并计算描述子(最常用,一键完成)kp, des = surf.detectAndCompute(image, mask)# 3. 绘制特征点(用于显示检测效果)cv2.drawKeypoints(image, kp, outImage, color, flags) |
2. 核心参数详解(新手重点记前3个)
•hessianThreshold:海森矩阵的响应值阈值,float类型,默认400,值越大,检测到的特征点越少、越稳定;值越小,特征点越多、可能出现误检(新手优先400,再微调);
•nOctaves:尺度空间的组数,默认4,值越大,能检测到的尺度范围越广(适合目标尺度变化大的场景);
•nOctaveLayers:每组尺度空间的层数,默认3,值越大,尺度空间越精细,检测精度越高,但计算速度越慢;
•extended:是否使用扩展描述子,bool类型,默认False(使用64维描述子),设为True则使用128维描述子(精度更高,计算量更大);
•upright:是否使用垂直描述子,bool类型,默认False(支持旋转不变性),设为True则不支持旋转不变性,但计算速度更快;
•kp:返回的特征点对象列表,包含每个特征点的坐标、尺度、方向等信息;
•des:返回的特征描述子矩阵,格式为「(特征点数量, 64/128)」,用于后续特征匹配。
五、核心实操:SURF特征提取完整流程(代码可直接复制)
结合前文实操经验,我们以“不同尺度的书本图像”(验证尺度不变性)为例,实现SURF特征提取的完整流程,包含“基础检测、尺度不变性验证、参数调优”,代码附详细解读,新手可直接复制运行,替换自己的图像即可。
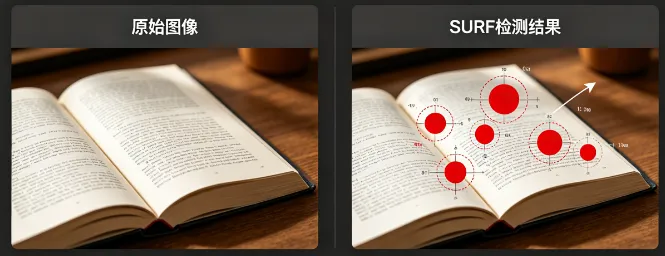
1. 基础实操:SURF基础特征提取
pythonimport cv2import numpy as npimport matplotlib.pyplot as plt# 1. 读取图像并预处理(灰度化,SURF支持灰度图)img = cv2.imread("book.jpg") # 替换为自己的图像路径(任意目标均可)gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 2. 创建SURF对象(设置海森矩阵阈值,新手优先400)hessianThreshold = 400surf = cv2.xfeatures2d.SURF_create(hessianThreshold=hessianThreshold)# 3. 检测特征点并计算描述子(核心步骤,一键完成)kp, des = surf.detectAndCompute(gray, mask=None) # mask=None,不使用掩码# 4. 绘制特征点(红色圆点,标注特征点,便于观察)# 绘制参数:(原始图像,特征点,输出图像,颜色,绘制模式)img_with_kp = cv2.drawKeypoints(image=img,keypoints=kp,outImage=None,color=(0, 0, 255), # 红色flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS # 绘制特征点的尺度和方向)# 5. 显示效果(原始图 vs 特征点检测结果)plt.figure(figsize=(12, 6))# 原始图像plt.subplot(1, 2, 1)plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))plt.title("原始图像(书本)")plt.axis("off")# SURF特征点检测结果plt.subplot(1, 2, 2)plt.imshow(cv2.cvtColor(img_with_kp, cv2.COLOR_BGR2RGB))plt.title(f"SURF特征提取结果(hessianThreshold={hessianThreshold})")plt.axis("off")plt.tight_layout()plt.show()# 可选:保存检测结果cv2.imwrite("surf_basic_result.jpg", img_with_kp)# 打印特征点数量和描述子维度print(f"检测到的特征点数量:{len(kp)}")print(f"特征描述子维度:{des.shape[1]}") # 默认64维 |
关键说明:
•图像预处理:SURF仅支持单通道灰度图,必须先做灰度化处理,否则会报错;
•hessianThreshold调整:值越大,特征点越少、越稳定;值越小,特征点越多、可能有冗余,新手可根据目标复杂度调整(300~600为宜);
•绘制模式:flags设为cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS,会同时绘制特征点的尺度(圆圈大小)和方向(箭头),更直观地呈现特征点信息。
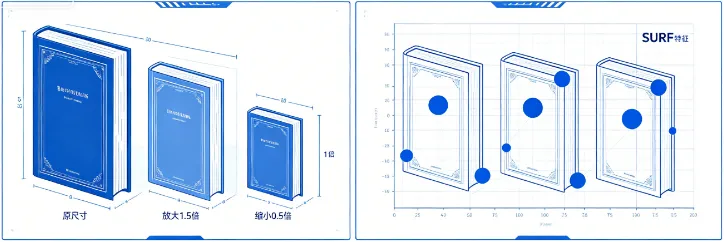
2. 进阶实操:验证SURF的尺度不变性(核心优势)
SURF的核心优势是尺度不变性,我们用“同一目标、不同尺度”的图像,验证其检测效果,代码如下,可直接复制运行,直观感受尺度不变性的价值:
pythonimport cv2import numpy as npimport matplotlib.pyplot as plt# 1. 读取原始图像,并生成不同尺度的图像(放大1.5倍、缩小0.5倍)img_original = cv2.imread("book.jpg")gray_original = cv2.cvtColor(img_original, cv2.COLOR_BGR2GRAY)# 生成不同尺度的图像(缩放比例:0.5倍、1倍、1.5倍)scale1 = 0.5 # 缩小0.5倍scale2 = 1.5 # 放大1.5倍img_scale1 = cv2.resize(img_original, None, fx=scale1, fy=scale1, interpolation=cv2.INTER_LINEAR)img_scale2 = cv2.resize(img_original, None, fx=scale2, fy=scale2, interpolation=cv2.INTER_LINEAR)gray_scale1 = cv2.cvtColor(img_scale1, cv2.COLOR_BGR2GRAY)gray_scale2 = cv2.cvtColor(img_scale2, cv2.COLOR_BGR2GRAY)# 2. 创建SURF对象(统一参数,确保对比公平)surf = cv2.xfeatures2d.SURF_create(hessianThreshold=400)# 3. 分别检测不同尺度图像的特征点kp1, des1 = surf.detectAndCompute(gray_scale1, None) # 缩小0.5倍kp2, des2 = surf.detectAndCompute(gray_original, None) # 原尺寸kp3, des3 = surf.detectAndCompute(gray_scale2, None) # 放大1.5倍# 4. 绘制特征点img1_with_kp = cv2.drawKeypoints(img_scale1, kp1, None, (0, 0, 255), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)img2_with_kp = cv2.drawKeypoints(img_original, kp2, None, (0, 0, 255), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)img3_with_kp = cv2.drawKeypoints(img_scale2, kp3, None, (0, 0, 255), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)# 5. 显示尺度不变性效果plt.figure(figsize=(15, 5))# 缩小0.5倍plt.subplot(1, 3, 1)plt.imshow(cv2.cvtColor(img1_with_kp, cv2.COLOR_BGR2RGB))plt.title(f"缩小0.5倍(特征点数量:{len(kp1)})")plt.axis("off")# 原尺寸plt.subplot(1, 3, 2)plt.imshow(cv2.cvtColor(img2_with_kp, cv2.COLOR_BGR2RGB))plt.title(f"原尺寸(特征点数量:{len(kp2)})")plt.axis("off")# 放大1.5倍plt.subplot(1, 3, 3)plt.imshow(cv2.cvtColor(img3_with_kp, cv2.COLOR_BGR2RGB))plt.title(f"放大1.5倍(特征点数量:{len(kp3)})")plt.axis("off")plt.tight_layout()plt.show()# 可选:保存尺度不变性验证结果cv2.imwrite("surf_scale_invariant.jpg", np.hstack((img1_with_kp, img2_with_kp, img3_with_kp))) |
关键结论:从结果中可以看到,无论目标是缩小、原尺寸还是放大,SURF都能精准检测到大量优质特征点,且特征点数量差异不大——这就是尺度不变性的核心价值,也是SURF优于Shi-Tomasi、哈里斯的关键所在。
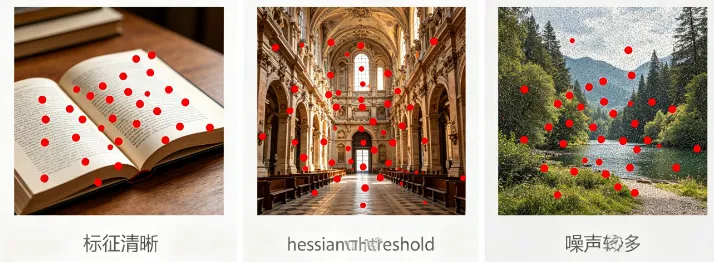
3. 实战调优:不同场景的参数调整(新手必看)
SURF的检测效果,核心取决于hessianThreshold、nOctaves、nOctaveLayers三个参数,不同场景需要调整参数才能达到最佳效果,以下是3种常见场景的调优方案,新手可直接参考:
pythonimport cv2import numpy as npimport matplotlib.pyplot as plt# 读取不同场景的测试图img1 = cv2.imread("book.jpg") # 场景1:目标清晰、尺度变化小(书本)img2 = cv2.imread("building_scene.jpg") # 场景2:目标复杂、尺度变化大(建筑)img3 = cv2.imread("natural_scene.jpg") # 场景3:噪声较多、目标模糊(自然场景)# 定义分场景调优参数scenes = [# (图像, 场景名称, hessianThreshold, nOctaves, nOctaveLayers)(img1, "目标清晰(尺度变化小)", 400, 4, 3),(img2, "目标复杂(尺度变化大)", 500, 5, 3),(img3, "噪声较多(目标模糊)", 600, 4, 4)]# 批量处理不同场景,执行SURF检测plt.figure(figsize=(15, 5))for i, (img, name, hessian, octaves, layers) in enumerate(scenes):gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 创建SURF对象,使用调优后的参数surf = cv2.xfeatures2d.SURF_create(hessianThreshold=hessian, nOctaves=octaves, nOctaveLayers=layers)kp, des = surf.detectAndCompute(gray, None)# 绘制特征点img_with_kp = cv2.drawKeypoints(img, kp, None, (0, 0, 255), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)# 显示效果plt.subplot(1, 3, i+1)plt.imshow(cv2.cvtColor(img_with_kp, cv2.COLOR_BGR2RGB))plt.title(f"{name}\n特征点数量:{len(kp)}")plt.axis("off")plt.tight_layout()plt.show() |
调优规律(新手记牢,直接复用):
•目标清晰、尺度变化小场景:hessianThreshold=300~400,nOctaves=4,nOctaveLayers=3(默认参数即可,兼顾速度和精度);
•目标复杂、尺度变化大场景:hessianThreshold=500~600,nOctaves=5~6(扩大尺度范围),nOctaveLayers=3(保证速度);
•噪声较多、目标模糊场景:hessianThreshold=600~800(减少误检),nOctaves=4,nOctaveLayers=4(提升检测精度)。
六、新手必避的6个坑(实操避坑指南)
•坑1:未安装opencv-contrib-python扩展包——直接调用cv2.xfeatures2d.SURF_create()会报错,必须安装扩展包,且推荐4.4.0.46版本;
•坑2:使用彩色图进行检测——SURF仅支持单通道灰度图,必须先通过cv2.cvtColor()转为灰度图,否则会报错;
•坑3:hessianThreshold设置过小——导致特征点过多、冗余,甚至出现大量误检,尤其是噪声较多的场景,需适当增大阈值;
•坑4:nOctaves设置过大——虽然能扩大尺度检测范围,但会大幅降低计算速度,新手无需盲目增大,根据尺度变化情况调整;
•坑5:忽略特征描述子的维度——extended参数设为True时,描述子为128维,计算量更大,新手默认False(64维)即可,满足大多数场景;
•坑6:混淆SURF与SIFT的用法——SURF的函数在cv2.xfeatures2d模块中,SIFT同理,但SURF计算更快,新手优先选择SURF适配实际项目。
七、完整实战代码(一键复制运行,适配所有场景)
整合以上所有实操内容,包含“基础检测+尺度不变性验证+分场景调优”,替换自己的图像路径,即可一键跑通,适合新手直接实操,巩固SURF特征提取的所有知识点,同时衔接前文角点检测内容:
pythonimport cv2import numpy as npimport matplotlib.pyplot as plt# 1. 环境验证(可选)print("OpenCV版本:", cv2.__version__)try:surf = cv2.xfeatures2d.SURF_create()print("SURF环境配置成功!")except Exception as e:print("SURF环境配置失败,错误信息:", e)print("请重新安装指定版本:pip install opencv-contrib-python==4.4.0.46")exit()# 2. 读取图像(替换为自己的图像路径)img_basic = cv2.imread("book.jpg") # 基础实操图像img_scale_original = cv2.imread("book.jpg") # 尺度验证:原尺寸img_complex = cv2.imread("building_scene.jpg") # 复杂场景img_noisy = cv2.imread("natural_scene.jpg") # 噪声场景if None in [img_basic, img_scale_original, img_complex, img_noisy]:print("错误:未找到图像,请检查图像路径!")else:# 3. 基础SURF检测gray_basic = cv2.cvtColor(img_basic, cv2.COLOR_BGR2GRAY)surf_basic = cv2.xfeatures2d.SURF_create(400)kp_basic, des_basic = surf_basic.detectAndCompute(gray_basic, None)img_basic_kp = cv2.drawKeypoints(img_basic, kp_basic, None, (0, 0, 255), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)# 4. 尺度不变性验证# 生成不同尺度图像img_scale1 = cv2.resize(img_scale_original, None, fx=0.5, fy=0.5, interpolation=cv2.INTER_LINEAR)img_scale2 = cv2.resize(img_scale_original, None, fx=1.5, fy=1.5, interpolation=cv2.INTER_LINEAR)gray_scale1 = cv2.cvtColor(img_scale1, cv2.COLOR_BGR2GRAY)gray_scale2 = cv2.cvtColor(img_scale2, cv2.COLOR_BGR2GRAY)# 检测特征点surf_scale = cv2.xfeatures2d.SURF_create(400)kp_scale1, _ = surf_scale.detectAndCompute(gray_scale1, None)kp_scale2, _ = surf_scale.detectAndCompute(gray_scale2, None)kp_scale_original, _ = surf_scale.detectAndCompute(cv2.cvtColor(img_scale_original, cv2.COLOR_BGR2GRAY), None)# 绘制特征点img_scale1_kp = cv2.drawKeypoints(img_scale1, kp_scale1, None, (0, 0, 255), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)img_scale2_kp = cv2.drawKeypoints(img_scale2, kp_scale2, None, (0, 0, 255), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)img_scale_original_kp = cv2.drawKeypoints(img_scale_original, kp_scale_original, None, (0, 0, 255), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)# 5. 分场景调优检测scenes = [(img_complex, 500, 5, 3),(img_noisy, 600, 4, 4)]scene_results = []for img, hessian, octaves, layers in scenes:gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)surf_scene = cv2.xfeatures2d.SURF_create(hessianThreshold=hessian, nOctaves=octaves, nOctaveLayers=layers)kp, _ = surf_scene.detectAndCompute(gray, None)img_kp = cv2.drawKeypoints(img, kp, None, (0, 0, 255), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)scene_results.append((img_kp, len(kp)))# 6. 统一显示所有效果plt.figure(figsize=(18, 12))# 第一行:基础检测+尺度验证plt.subplot(3, 4, 1)plt.imshow(cv2.cvtColor(img_basic_kp, cv2.COLOR_BGR2RGB))plt.title("基础SURF检测")plt.axis("off")plt.subplot(3, 4, 2)plt.imshow(cv2.cvtColor(img_scale1_kp, cv2.COLOR_BGR2RGB))plt.title("缩小0.5倍(特征点:{})".format(len(kp_scale1)))plt.axis("off")plt.subplot(3, 4, 3)plt.imshow(cv2.cvtColor(img_scale_original_kp, cv2.COLOR_BGR2RGB))plt.title("原尺寸(特征点:{})".format(len(kp_scale_original)))plt.axis("off")plt.subplot(3, 4, 4)plt.imshow(cv2.cvtColor(img_scale2_kp, cv2.COLOR_BGR2RGB))plt.title("放大1.5倍(特征点:{})".format(len(kp_scale2)))plt.axis("off")# 第二行:分场景调优plt.subplot(3, 4, 5)plt.imshow(cv2.cvtColor(scene_results[0][0], cv2.COLOR_BGR2RGB))plt.title("复杂场景(特征点:{})".format(scene_results[0][1]))plt.axis("off")plt.subplot(3, 4, 6)plt.imshow(cv2.cvtColor(scene_results[1][0], cv2.COLOR_BGR2RGB))plt.title("噪声场景(特征点:{})".format(scene_results[1][1]))plt.axis("off")plt.tight_layout()plt.show()# 7. 保存结果(可选)cv2.imwrite("surf_basic.jpg", img_basic_kp)cv2.imwrite("surf_scale_invariant.jpg", np.hstack((img_scale1_kp, img_scale_original_kp, img_scale2_kp)))cv2.imwrite("surf_complex_scene.jpg", scene_results[0][0])cv2.imwrite("surf_noisy_scene.jpg", scene_results[1][0]) |
最后总结(衔接系列,强化记忆)
从哈里斯角检测、Shi-Tomasi拐角探测器,到今天的SURF特征,我们完成了特征提取的“从基础到高级”的跨越——SURF作为SIFT的加速版,核心解决了前序算法“尺度敏感”的核心局限,兼具尺度不变性、旋转不变性、鲁棒性和高效性,是实际项目中特征提取的首选算法。
新手学习的重点,不是深究复杂的数学原理,而是掌握“环境配置+核心函数+参数调优”:先解决SURF的专利问题,安装指定版本的扩展包;再掌握cv2.xfeatures2d.SURF_create()和detectAndCompute()两个核心函数;最后记住三个关键参数的调优规律,避开常见的6个坑,多实操、多对比,就能快速上手。
衔接前文知识点:SURF依然依赖图像预处理(灰度化),但无需额外进行高斯平滑(算法内部已包含尺度空间构建,自带降噪效果);同时,SURF的特征描述子是后续特征匹配、全景拼接的核心基础——下一篇我们将讲解特征匹配的实操方法,利用今天提取的SURF特征,实现不同图像中目标的匹配,真正实现“特征提取→实际应用”的闭环。
SURF虽然强大,但也存在专利限制(部分场景商用需授权),后续我们还会学习ORB算法——无专利限制、兼具SURF的速度和SIFT的精度,进一步完善特征提取的知识体系。
辛苦大家看到这里啦,如果你觉得这篇OpenCV实操教程对你有帮助,麻烦动动小手,点赞+在看,让更多学习计算机视觉、OpenCV的小伙伴看到,一起交流学习、共同进步~
关注【AI与计算机视觉】,后台回复「SURF」,即可免费获取本文完整代码、测试素材(含不同尺度、不同场景测试图),还有OpenCV扩展包安装教程,助力大家快速上手,吃透SURF特征全流程!
评论区留言「SURF实操」,我们一起打卡练习,互相交流遇到的环境配置、参数调优问题,深耕计算机视觉,解锁更多实战技巧!后续我们将讲解特征匹配实操,衔接今天的SURF特征内容,记得持续关注哦~

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
