【UTD24+代码开源|EV充电调度】从最大流到最优充电:电动汽车调度背后的运筹学逻辑
- 2026-06-23 10:47:14



关注公众号,查看往期更多资讯
联系小编:Fightingforall23(注明来意)
详细内容,请点击本帖底部 阅读原文
往期群聊:回复本公众号:专刊,互助,岗位 等进入群聊

L. Winschermann, A. Antoniadis, M. E. T. Gerards, G. Hoogsteen, and J. Hurink, “Relating electric vehicle charging to speed scaling with job-specific speed limits,” Oper. Res., early access, Sep. 2025, doi: 10.1287/opre.2024.1044.
【正文】
随着电动汽车(EV)的大规模普及,一个看似“工程实现层面”的问题,正逐渐演变为严肃的运筹优化与电力系统挑战:👉 在电网容量受限的情况下,如何为大量电动汽车安排充电,既满足用户需求,又避免功率峰值和能量损耗?
近期,来自**荷兰特温特大学(University of Twente)**的研究团队——Leoni Winschermann、Antonios Antoniadis、Marco E. T. Gerards、Gerwin Hoogsteen 与 Johann Hurink——在运筹学领域顶级期刊 《Operations Research》 发表了一篇极具代表性的工作:
Relating Electric Vehicle Charging to Speed Scaling with Job-Specific Speed Limits
该论文于 2025 年在线发表(Articles in Advance),将 电动汽车充电调度问题 与 经典的速度调度(Speed Scaling)理论 建立了深刻联系,为 EV 充电调度提供了一种结构清晰、可证明最优、计算高效的新思路。
🌍 研究背景|为什么“聪明充电”这么难?
🔌 现实场景在大型停车场、园区或企业车队中,往往同时接入几十甚至上百辆电动汽车。如果所有车辆“随到随充”,就会带来:
⚠️ 变压器过载风险
📉 能量损耗显著增加(功率平方/立方相关)
🔄 电网运行不稳定
📐 学术挑战从建模角度看,EV 充电问题至少同时具备以下特征:
⏱️ 时间约束:每辆车有到达时间、离开时间
🔋 能量需求约束:必须在离开前充够电
🚘 个体功率上限:不同车辆最大充电功率不同
📊 系统目标是“整体功率曲线”,而不是单车最优
传统方法多采用:
数学规划(LP/QP)
MPC(模型预测控制)
启发式或规则法
👉 问题在于:这些方法往往没有利用问题的内在结构,难以解释“为什么这样充是最优的”。
✨ 研究亮点|把 EV 充电“翻译”为速度调度问题
这篇论文最精彩的地方,在于它做了一件非常“运筹”的事情:
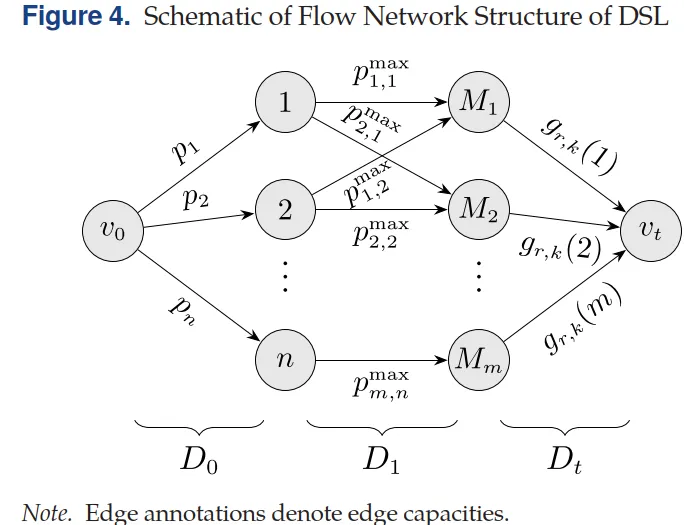
💡 把 EV 充电调度,等价映射为“带作业速度上限的速度调度问题”(Deadline-based Speed Scaling with Speed Limits, DSL)。
🔁 关键对应关系
在此基础上,作者提出了一个核心算法:
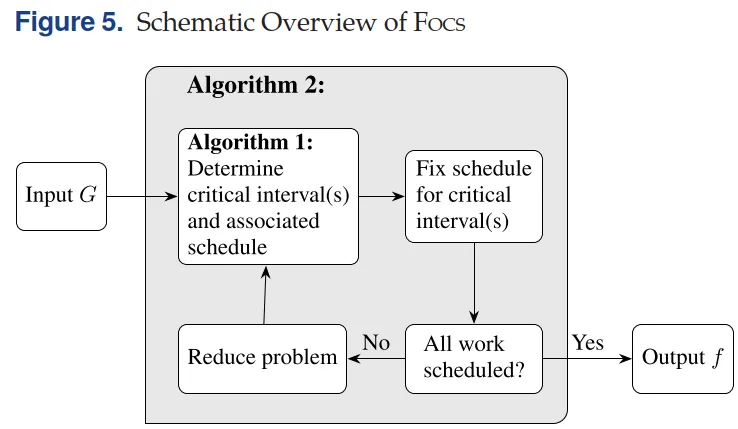
🚀 FOCS:Flow-based Offline Charging Scheduler
🔹 核心思想:
将时间划分为“原子区间”
构建 最大流网络
通过 多轮 max-flow,逐步识别“关键时间段(critical intervals)”
在这些时间段内,功率水平不可再降低
🔹 理论优势:
✅ 全局最优(严格凸目标)
✅ 给出 KKT 最优性条件
✅ 证明调度结构的唯一性(功率曲线)
🔹 在线情形下,作者还分析了Average Rate (AVR) 算法和Optimal Available (OA) 算法,并给出了**竞争比(competitive ratio)**的严格上界。
📊 数值实验|400 辆车,只要 2.5 秒
理论之外,作者使用真实 EV 充电数据进行了大量数值实验,结果非常“工程友好”:
⚙️ 实验规模
🚗 最多 400 辆 EV
⏲️ 时间分辨率:15 分钟
📈 FOCS 算法算得快吗?
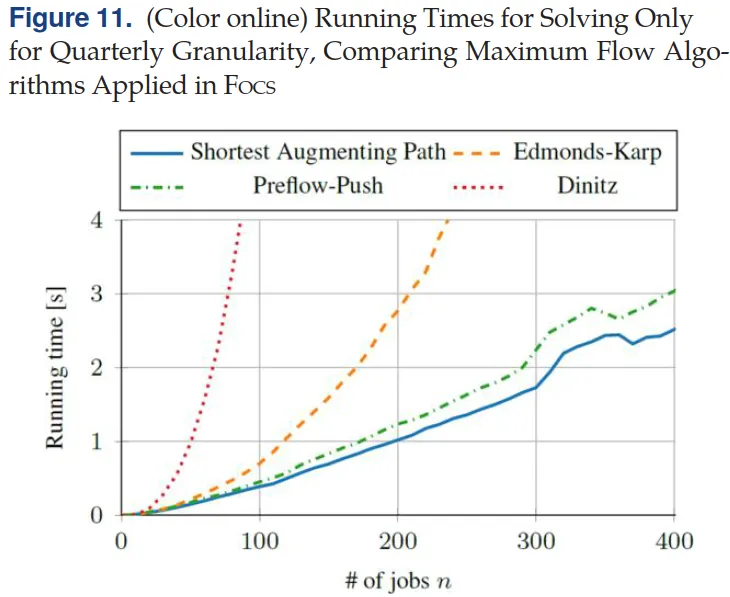
作者首先测试了 FOCS 在不同最大流算法实现下的实际运行时间,结果如图 11 所示。实验发现,不同最大流算法对 FOCS 的计算效率影响非常明显:
使用 shortest augmenting path 方法时,FOCS 的运行时间在 EV 数量增加到 400 辆之前,整体增长趋势接近线性,计算效率较高;
相比之下,Edmonds–Karp 和 Dinitz 方法的运行时间随问题规模增长更快,在较大规模下出现明显的非线性增长;
Preflow–push 方法的表现与 shortest augmenting path 类似,同样能够保持较好的计算效率。
总体来看,数值结果表明:在合理选择最大流算法的前提下,FOCS 可以在真实规模的电动汽车充电调度问题中高效运行,具备实际应用潜力。
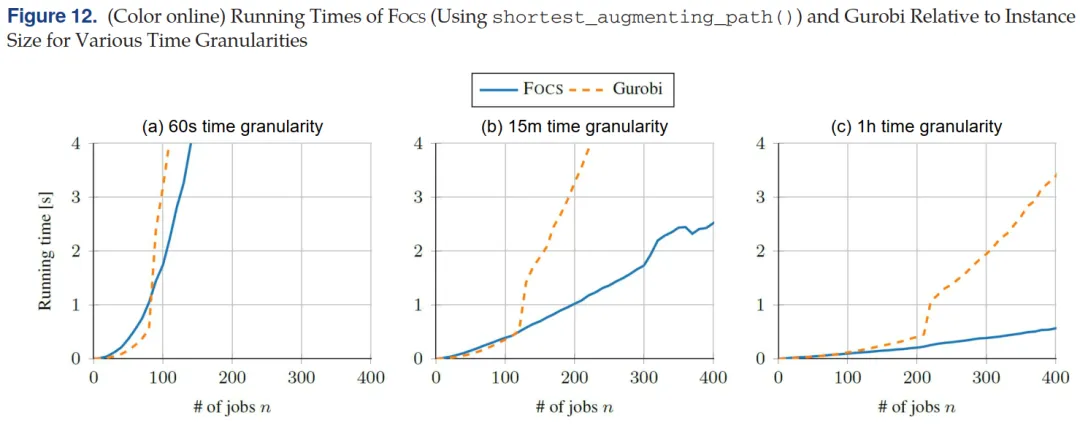
📊 FOCS 与商用求解器 Gurobi 的对比
在数值实验中,作者进一步将 FOCS 与商用优化求解器 Gurobi 进行了对比。图 12 展示了在 不同时间粒度(1 分钟、15 分钟、1 小时) 下,两种方法的运行时间随 EV 数量变化的情况。
实验结果可以总结为几个直观结论:
在 问题规模较小 时,Gurobi 求解的二次规划问题运行速度与 FOCS 相当,部分情况下甚至略快;
但随着 EV 数量增加,Gurobi 的运行时间增长明显更快,而 FOCS 的运行时间增长趋势相对平缓;
因此,当问题规模达到一定水平后,FOCS 在运行时间上开始明显优于 Gurobi:
约 90 辆 EV(1 分钟粒度)
约 120 辆 EV(15 分钟粒度)
约 80 辆 EV(1 小时粒度)
⚠️ 一个有意思的现象
图 12 还显示,在较大规模实例下,Gurobi 的运行时间会出现突然陡增。作者指出,这种现象可能与内存使用达到某一阈值有关,从而导致求解效率急剧下降。
相比之下,FOCS 的运行时间整体表现更加稳定,在大多数实验规模下呈现接近线性的增长趋势。
⏱ 一个直观对比数字
为了给读者一个更直观的感受,作者给出了如下对比:
在 1 分钟时间粒度、400 辆 EV 的情况下:
FOCS:约 36 秒
Gurobi:约 62 秒
而在实际工程中更常用的 15 分钟时间粒度下,FOCS 对 400 辆 EV 的调度仅需约 2.5 秒(中位数)。
📊 在线算法 AVR 与 OA 的实际表现
需要指出的是,FOCS 是一种离线最优算法,依赖于对所有车辆到达与离开信息的完全掌握。然而,在实际电动汽车充电场景中,未来车辆信息往往不可预知。因此,作者进一步对两种经典在线算法 Average Rate(AVR) 和 Optimal Available(OA) 进行了仿真评估,并以 FOCS 的最优解作为性能基准,以量化“信息不完全”所带来的性能损失。
图 13 展示了在 500 个真实数据实例中,在线算法 AVR 和 OA 相对于离线最优解 FOCS 的实际性能表现。结果表明,两种在线算法在真实场景下的性能损失远小于其理论最坏情况,其中 OA 的整体表现优于 AVR。
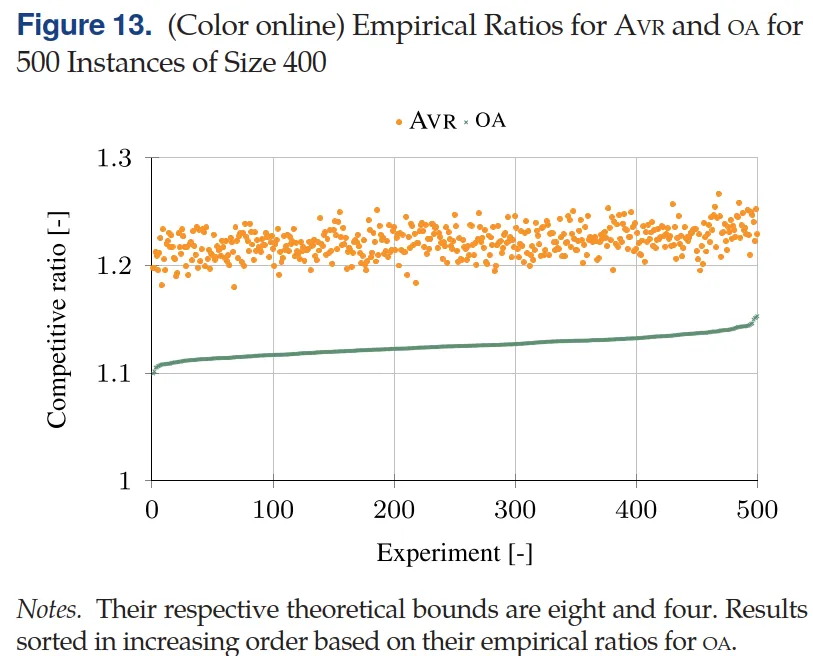
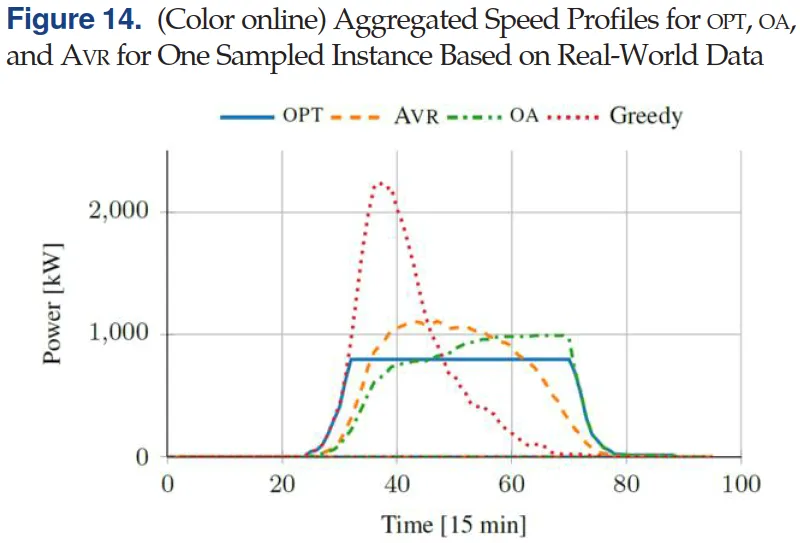
图 14 对比了一个代表性实例中,不同算法得到的聚合充电功率曲线。FOCS 产生最平滑、能耗最低的曲线,AVR 充电过程更均匀,而 OA 更倾向于将负荷推迟到后段;无控制策略 则产生明显的功率峰值。整体来看,AVR 和 OA 均显著优于无控制的贪婪充电策略。
代码开源:
https://pubsonline.informs.org/doi/suppl/10.1287/opre.2024.1044
🧭 结语|为什么这篇文章值得反复读?
从科研视角看,这篇工作至少有三点启示:
🔹 1️⃣ 问题建模比算法本身更重要EV 充电 ≠ 简单的功率分配,而是一个深度结构化的调度问题。
🔹 2️⃣ 运筹学经典理论依然“宝刀未老”Speed Scaling、最大流、KKT 条件,在新能源系统中焕发新生命。
🔹 3️⃣ 为未来研究打开接口
EV + 可再生能源
EV 车队 +微电网
在线调度 + 不确定性
📌 如果你从事:
电动汽车充电调度
综合能源系统
运筹优化与算法设计
这篇论文,非常值得精读。

注:素材来源于网上公开开源内容。如有侵权,随时可删。本文编辑过程借助ChatGPT润色。如需了解更多内容,请访问(点击阅读原文):https://pubsonline.informs.org/doi/full/10.1287/opre.2024.1044


扫码关注!
一个智慧交通与能源前沿动态与科研资源平台


论文分享 | 期刊投稿
科研汇报 | 学术招聘
点亮在看,你最好看!



1.【MESPO|2024招生】MESPO团队2024年博士及RA招生现状(更多请关注公众号)
2.【TSG好文|船舶+天气航线】芬兰阿尔托大学 费志能,李正茂等:基于天气航线的多能船舶微电网运行方法:一种风险规避的随机优化方法
3.【群聊邀请|一网打尽】25年公众号最全群聊邀请,海量帮助+科研探讨+同行交流,等你来!广告勿入!
4.【六刊联合|智能电网】26年7月31!MDPI六大期刊联合征稿,课题“智能灵活低碳电网(第二弹)”+专刊群聊邀请
5.【团队介绍|芬兰MESPO】芬兰阿尔托大学李正茂教授“AI/优化+综合能源系统(冷热电氢水等)规划和运行”团队介绍+互助群聊邀请

