在多线程编程中,当多个线程需要访问共享资源时,为了避免数据不一致等问题,我们常常会使用互斥锁来保证同一时间只有一个线程能够访问该资源。它就像一位严格的门卫,确保同一时间只有一个线程能够进入临界区,对共享资源进行访问或修改,从而避免了数据竞争和不一致的问题。
但随着业务复杂度的攀升和并发量的剧增,互斥锁的短板逐渐暴露,尤其是在多读少写的场景中,互斥锁会造成大量读线程阻塞,严重降低系统并发吞吐量。
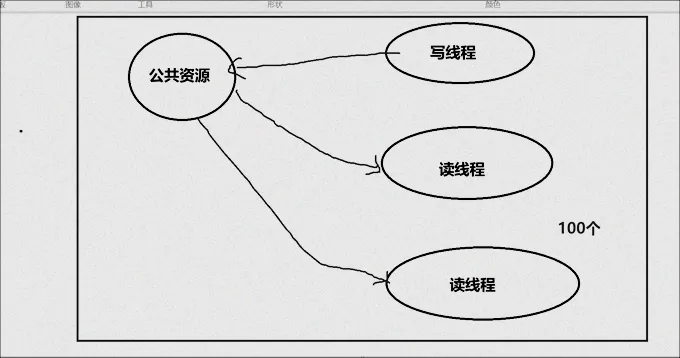
想象一下,在一个高并发的数据库查询系统中,大量的线程可能只是需要读取数据库中的数据,而很少有线程需要对数据进行写入操作。如果使用 mutex,即使所有线程都只是进行读操作,也必须一个一个地排队进入临界区,这无疑极大地浪费了系统资源和性能。因为读操作并不会修改数据,理论上多个读操作是可以同时进行的,并不会产生数据竞争的问题。
在这种读多写少的场景下,我们迫切需要一种更高效的锁机制,能够充分利用读操作的可并行性,提高系统的整体吞吐量。于是,Linux 内核引入了读写锁,它就像是为这种场景量身定制的解决方案。
一、读写锁的核心原理与特性
1.1 读写锁的三大核心规则:读读共享,写写 / 读写互斥
读写锁的核心逻辑很简洁,可高度概括为三条关键规则:读读共享,写写 / 读写互斥。
第一,读读共享 ,无相互阻塞。当多个线程同时发起读操作请求时,它们就像一群安静的读者进入图书馆阅览室,各自找到位置坐下阅读,彼此之间不会产生任何阻塞。每个线程都可以轻松获取读锁,然后并行地读取共享资源。例如在一个在线文档阅读系统中,众多用户(对应多个线程)可以同时在线查看文档内容(读操作),他们的阅读行为互不干扰,系统的响应速度也不会因为读者数量的增加而明显下降,极大地提高了系统的并发处理能力。
第二,写写互斥 ,多个写线程间互斥。写操作就如同在图书馆的珍贵古籍上进行修改,必须小心翼翼且只能由一人完成。当一个线程持有写锁对共享资源进行写入操作时,其他任何试图获取写锁的线程都将被无情地拒之门外,只能在门外苦苦等待,直到当前持有写锁的线程完成操作并释放锁。比如在数据库的更新操作中,如果多个线程同时尝试修改同一条记录,就可能导致数据不一致,通过写写互斥规则,就能确保每次只有一个线程能够对数据进行修改,保证了数据的完整性和准确性。
第三,读写互斥 ,写锁持有期间读线程阻塞,反之亦然。这一规则如同在图书馆中,当工作人员正在对书籍进行整理、修改(写操作)时,读者就不能随意借阅书籍(读操作);反之,当有大量读者正在借阅书籍(读操作)时,工作人员也无法对书籍进行修改。无论是写线程持有锁,还是读线程持有锁,其他类型的线程都无法获取锁,只能等待。例如在一个配置文件的读写场景中,当系统正在更新配置文件(写操作)时,应用程序就不能读取该配置文件,否则可能读取到不完整或错误的配置信息;而当应用程序正在频繁读取配置文件(读操作)时,也不允许进行配置文件的更新操作,以免影响应用程序的正常运行。
同时,多数 Linux 系统中读写锁默认 写优先 ,确保写操作不会被长期饥饿。这就好比在图书馆的管理中,虽然读者很多,但如果有工作人员需要对书籍进行紧急整理(写操作),会优先满足工作人员的需求,避免他们因为等待时间过长而无法完成重要工作。在多线程环境中,写操作通常涉及到对共享资源的修改,其重要性不言而喻,写优先策略能够保证写操作及时得到执行,防止因为大量读操作的存在而导致写操作被无限期推迟,从而维护了系统的稳定性和数据的实时性。
1.2 两种同步模式:强读者 vs 强写者
读写锁分为两种同步模式,各自执导着不同的并发场景,让读写锁在不同的业务需求中都能发挥出最佳性能。
强读者模式下,只要无写操作,读线程即可随时获取读锁,适合读频率极高的场景。这种模式就像是一个大型图书馆的日常运营,在正常情况下,图书馆里的读者(读线程)来来往往,不断地借阅和归还书籍(读操作)。由于大部分时间没有工作人员对书籍进行整理或修改(无写操作),所以读者们可以自由地进出图书馆,随意地获取书籍进行阅读,无需等待。例如在一个新闻资讯网站中,大量用户会频繁地访问网站,读取最新的新闻内容(读操作),而网站管理员对新闻内容的更新(写操作)相对较少。在这种读多写少的场景下,强读者模式就能够充分发挥优势,让众多用户能够快速地获取新闻,提高了系统的响应速度和用户体验,系统的并发吞吐量也得到了极大的提升。
强写者模式下,需等待所有写操作完成后,读线程才能获取读锁,可保证读线程拿到最新数据,适用于实时性要求高的金融、监控系统。这就好比在一家银行的金库管理中,每当有工作人员对金库中的现金进行盘点、调配或更新账目(写操作)时,其他人员(读线程)都必须在外面等待,直到工作人员完成所有的操作,确保金库中的数据准确无误后,其他人员才能进入金库进行相关操作(读操作)。例如在股票交易系统中,每一笔交易的发生都需要及时更新股票的价格、成交量等数据(写操作),而投资者们(读线程)则希望能够获取到最新的股票数据,以便做出准确的投资决策。在这种实时性要求极高的场景下,强写者模式就显得尤为重要,它能够保证投资者们读取到的数据是最新的,避免因为读取到旧数据而导致投资失误,维护了金融市场的稳定和公平。
1.3 读写锁的内部实现机制
在 Linux 系统中,读写锁的内部实现依赖于一些底层的同步原语和数据结构,以实现高效的并发控制。其中最经典的就是基于互斥锁(Mutex)和条件变量(Condition Variable)的实现方式。
以经典的基于互斥锁和条件变量的实现方式为例,读写锁内部会维护一个互斥锁,用于保护读写锁的状态信息,防止多线程同时修改导致数据不一致。同时,还会维护一个读计数器(Read Counter),记录当前持有读锁的线程数量;以及一个写标志(Write Flag),表示是否有写线程正在持有锁或者等待获取锁。
当线程尝试获取读锁时,它会首先获取互斥锁,以保护对读计数器的操作。然后检查写标志,如果写标志为假(表示没有写线程正在持有锁或等待获取锁),则增加读计数器,并释放互斥锁,允许读线程继续执行。如果写标志为真,说明有写线程正在进行操作,读线程会释放互斥锁,并等待条件变量的通知。
当线程尝试获取写锁时,同样先获取互斥锁。接着检查读计数器和写标志,如果读计数器为 0(表示没有读线程正在持有锁)且写标志为假,则设置写标志,并释放互斥锁,允许写线程进行操作。如果读计数器不为 0 或者写标志为真,说明有读线程正在持有锁或者有写线程正在进行操作,写线程会释放互斥锁,并等待条件变量的通知。
1.4 读写锁的运行逻辑
为了更清晰地理解读写锁的运行逻辑,我们通过一个实际的例子来拆解——假设我们有一个共享的数据结构,例如一个存储商品信息的结构体,多个线程需要对其进行读写操作,看看读写锁如何协调这些线程。
当线程 A 想要读取商品信息时,它会调用 pthread_rwlock_rdlock 函数尝试获取读锁。如果此时没有写线程持有锁,读锁的获取会立即成功,线程 A 可以读取共享数据。
pthread_rwlock_t rwlock;// 初始化读写锁pthread_rwlock_init(&rwlock, NULL);// 线程A获取读锁pthread_rwlock_rdlock(&rwlock);// 读取共享数据read_shared_data();// 释放读锁pthread_rwlock_unlock(&rwlock);
如果线程 B 同时也想要读取商品信息,它同样调用 pthread_rwlock_rdlock 函数。由于此时没有写线程持有锁,并且读锁是共享的,所以线程 B 也能成功获取读锁,与线程 A 同时读取共享数据,实现了读读共享。
// 线程B获取读锁pthread_rwlock_rdlock(&rwlock);// 读取共享数据read_shared_data();// 释放读锁pthread_rwlock_unlock(&rwlock);
然而,当线程 C 想要更新商品信息时,它会调用 pthread_rwlock_wrlock 函数尝试获取写锁。如果此时有线程持有读锁(比如线程 A 和线程 B),或者有其他写线程持有锁,线程 C 获取写锁的操作会被阻塞,直到所有读线程释放读锁并且没有其他写线程持有锁。
// 线程C获取写锁pthread_rwlock_wrlock(&rwlock);// 更新共享数据update_shared_data();// 释放写锁pthread_rwlock_unlock(&rwlock);
当线程 C 成功获取写锁并更新完数据后释放写锁,其他等待的线程(无论是读线程还是写线程)就有机会获取锁并进行相应的操作。这样,通过读写锁的机制,有效地控制了多线程对共享资源的并发访问,保证了数据的一致性和完整性。
二、Linux 读写锁的函数接口与代码实现
2.1 读写锁函数接口全家桶:初始化到销毁
在 Linux 下,读写锁基于强大的 pthread 库实现,其核心接口涵盖了从初始化到销毁的全生命周期操作,犹如为我们提供了一套精密的工具,让我们能够精准地操控读写锁,保障多线程环境下共享资源的安全访问。
初始化读写锁是使用读写锁的第一步,我们可以使用 pthread_rwlock_init 函数,就像为一场精彩的演出搭建舞台。其函数原型为:
intpthread_rwlock_init(pthread_rwlock_t *rwlock, constpthread_rwlockattr_t *attr);
其中,rwlock 是指向读写锁变量的指针,attr 则用于设置读写锁的属性。若 attr 为 NULL,将采用默认属性。这个函数为读写锁的后续操作奠定了基础,确保其在正确的初始状态下运行。例如,在一个多线程的文件读取系统中,我们需要在多个线程访问文件内容之前,先初始化读写锁,以保证文件内容的读取和写入操作能够有序进行。
当我们完成对读写锁的使用后,就需要调用 pthread_rwlock_destroy 函数来销毁它,清理舞台,释放资源。函数原型如下:
intpthread_rwlock_destroy(pthread_rwlock_t *rwlock);
在实际应用中,这一步同样不可或缺。比如在一个服务器程序中,当服务器停止运行时,及时销毁不再使用的读写锁,能够避免资源的浪费,提高系统的稳定性和性能。
在多线程的并发世界里,获取读锁和写锁是最频繁的操作,它们就像是舞台上的主角,掌控着共享资源的访问权限。pthread_rwlock_rdlock 函数用于获取读锁,当多个线程同时调用它时,如果没有写锁被持有,这些线程都能顺利获取读锁,实现读读共享,就像一群观众可以同时安静地观看演出。函数原型为:
intpthread_rwlock_rdlock(pthread_rwlock_t *rwlock);
而 pthread_rwlock_wrlock 函数用于获取写锁,它具有独占性,当一个线程成功获取写锁后,其他线程无论是获取读锁还是写锁,都将被阻塞,直到写锁被释放,就像演出过程中,舞台被表演者独占,其他人需要等待。其函数原型是:
intpthread_rwlock_wrlock(pthread_rwlock_t *rwlock);
在实际调用这些函数时,必须检查参数的合法性,确保传入的读写锁指针有效,避免出现空指针引用等错误。同时,要仔细处理函数的返回值,根据返回值判断操作是否成功。若返回值不为 0,则表示操作失败,需要根据具体的错误码进行相应的错误处理,比如记录日志、提示用户等,以保证程序的健壮性和稳定性。
2.2 非阻塞锁 vs 阻塞锁:适用场景与返回值解析
阻塞锁,当线程尝试获取锁失败时,就像一位耐心的舞者在后台静静等待,直到获取到锁才会继续前进。它会让线程进入等待状态,线程调度器会将其挂起,暂时剥夺其 CPU 使用权,直到锁被释放,其他线程通知它可以获取锁为止。这种锁适用于那些对操作顺序和完整性要求极高的场景,就像一场精心编排的芭蕾舞表演,每一个动作都需要按照既定的顺序和节奏进行,不能有丝毫差错。例如在银行转账系统中,资金的转移操作必须保证原子性和一致性,不允许出现部分成功或数据不一致的情况。在这种场景下,阻塞锁能够确保每个转账操作都能完整地执行,不会因为其他线程的干扰而出现问题。
而非阻塞锁则截然不同,它更像是一位充满活力的街舞舞者,当尝试获取锁失败时,不会停下来等待,而是立即返回错误,就像街舞表演中,舞者遇到障碍时会迅速调整动作,继续舞动。线程可以继续执行其他任务,不会被锁阻塞而陷入等待状态。这种锁适用于那些非核心流程或者对响应速度要求极高的场景,就像街舞表演中,舞者可以根据现场气氛和观众反应灵活调整动作,不需要严格遵循固定的顺序。比如在一个缓存查询系统中,当线程尝试读取缓存数据时,如果使用非阻塞读锁,即使获取锁失败,线程也可以立即返回,尝试从其他数据源获取数据,或者进行其他操作,而不会因为等待锁而浪费大量时间,从而提高了系统的整体响应速度。
在返回值方面,阻塞锁获取成功时返回 0,表示一切顺利,线程成功获取到了锁,可以开始执行临界区代码;而获取失败时,会返回非零的错误码,这些错误码就像是一个个信号灯,指示着不同的错误情况,例如 EAGAIN 表示资源暂时不可用,需要稍后重试,EINVAL 表示传入的参数无效等。我们可以根据这些错误码,编写相应的错误处理逻辑,确保程序在遇到问题时能够优雅地应对。
非阻塞锁的返回值则更加简洁明了,获取成功时同样返回 0,获取失败时直接返回 EBUSY 错误,表示锁正被其他线程持有,无法立即获取。线程可以根据这个返回值,迅速做出决策,是继续尝试获取锁,还是执行其他任务。例如在一个高并发的 Web 服务器中,当多个请求同时到达,尝试获取非阻塞锁进行资源访问时,获取失败的线程可以立即返回,向用户返回一个提示信息,告知用户资源暂时不可用,请稍后重试,而不是让用户一直等待,大大提升了用户体验。
2.3 经典案例:3 写 5 读线程操作全局变量
为了更直观地感受读写锁的强大威力,我们来看一个经典的代码案例。
假设我们有一个全局变量,多个线程需要对其进行读写操作,其中有 3 个写线程负责修改这个全局变量,5 个读线程负责读取它。在这个场景中,我们将对比互斥锁与读写锁的执行效果,就像比较两位不同的指挥家,看谁能让这场多线程的 “交响乐” 演奏得更加和谐美妙。
首先,我们需要初始化读写锁,为这场表演搭建好舞台。在 C 语言中,可以使用以下代码实现:
#include<pthread.h>#include<stdio.h>// 定义全局变量int global_variable = 0;// 定义读写锁pthread_rwlock_t rwlock;// 写线程函数void* write_thread(void* arg){ for (int i = 0; i < 3; i++) { // 获取写锁 pthread_rwlock_wrlock(&rwlock); global_variable++; printf("Write Thread: Incremented global_variable to %d\n", global_variable); // 释放写锁 pthread_rwlock_unlock(&rwlock); } return NULL;}// 读线程函数void* read_thread(void* arg){ for (int i = 0; i < 3; i++) { // 获取读锁 pthread_rwlock_rdlock(&rwlock); printf("Read Thread: global_variable is %d\n", global_variable); // 释放读锁 pthread_rwlock_unlock(&rwlock); } return NULL;}
在上述代码中,首先定义了一个全局变量global_variable,并初始化为 0。然后,定义了一个读写锁rwlock。write_thread函数是写线程的执行体,它会循环 3 次,每次获取写锁后,对全局变量进行自增操作,并打印当前的全局变量值,最后释放写锁。read_thread函数是读线程的执行体,它同样循环 3 次,每次获取读锁后,读取全局变量的值并打印,然后释放读锁。
在main函数中,创建 3 个写线程和 5 个读线程,并等待它们执行完毕,最后销毁读写锁:
intmain(){ pthread_t write_threads[3], read_threads[5]; // 初始化读写锁 pthread_rwlock_init(&rwlock, NULL); // 创建写线程 for (int i = 0; i < 3; i++) { pthread_create(&write_threads[i], NULL, write_thread, NULL); } // 创建读线程 for (int i = 0; i < 5; i++) { pthread_create(&read_threads[i], NULL, read_thread, NULL); } // 等待写线程结束 for (int i = 0; i < 3; i++) { pthread_join(write_threads[i], NULL); } // 等待读线程结束 for (int i = 0; i < 5; i++) { pthread_join(read_threads[i], NULL); } // 销毁读写锁 pthread_rwlock_destroy(&rwlock); return 0;}
通过这段代码,我们构建了一个多线程操作全局变量的场景,使用读写锁来控制对全局变量的访问。在这个场景中,写线程获取写锁时具有独占性,其他线程无法同时获取读锁或写锁,保证了写操作的原子性和数据一致性;而读线程获取读锁时,多个读线程可以同时进行,大大提高了读操作的并发性能。
2.4 编译运行与结果
写完代码后,就到了最关键的编译运行环节,这一步能直观验证我们的代码是否生效,见证读写锁的核心特性,看看它是否如我们预期般发挥作用。
编译这段代码时,我们需要链接 pthread 库,这就好比为音乐会邀请专业的乐队伴奏,确保代码能够正常运行。在 Linux 系统中,我们可以在终端输入以下编译命令:
gcc -o rwlock_demo rwlock_demo.c -lpthread
其中,-o rwlock_demo 表示将编译后的可执行文件命名为 rwlock_demo,-lpthread 是关键参数,用于链接 pthread 库,缺少这个参数会导致读写锁相关函数未定义的错误,大家一定要牢记。
编译成功后,输入以下命令运行可执行文件:
运行后,我们可以在终端看到类似如下的输出(线程调度具有随机性,输出顺序可能略有不同,但核心规律一致):
Read Thread: global_variable is 0Read Thread: global_variable is 0Read Thread: global_variable is 0Read Thread: global_variable is 0Read Thread: global_variable is 0Write Thread: Incremented global_variable to 1Write Thread: Incremented global_variable to 2Read Thread: global_variable is 2Read Thread: global_variable is 2Read Thread: global_variable is 2Read Thread: global_variable is 2Read Thread: global_variable is 2Write Thread: Incremented global_variable to 3Read Thread: global_variable is 3Read Thread: global_variable is 3Read Thread: global_variable is 3Read Thread: global_variable is 3Read Thread: global_variable is 3
从输出结果中,能清晰看到读写锁的核心特性:一是读线程批量输出,多个读线程同时读取到相同的全局变量值,证明了“读读共享”,它们没有相互阻塞,实现了并行执行;二是写线程单独输出,每次写操作后全局变量值递增,且写操作期间没有读线程输出,证明了“写写互斥”“读写互斥”;三是写操作完成后,读线程读取到的是最新值,保证了数据一致性。
如果我们将代码中的读写锁替换为互斥锁,重新编译运行会发现,输出会变成“读一个、等一个”“写一个、等一个”的串行模式,并发效率会大幅下降。通过对比,更能凸显读写锁在多读少写场景下的性能优势。
这里还要提醒大家一个小细节:如果运行时出现“段错误”或“锁未初始化”相关错误,大概率是忘记初始化读写锁、未释放锁,或编译时未链接 pthread 库,逐一排查这几点即可解决。
三、横向对比:读写锁vs其他锁
3.1 读写锁 vs 互斥锁
用一张表格清晰对比二者核心差异,帮大家精准区分。
| 对比维度 | 读写锁 | 互斥锁 |
|---|
| 访问机制 | 读写分离,读读共享、写写/读写互斥 | 独占式访问,无论读写,同一时间仅一个线程持有锁 |
| 性能开销 | 状态管理复杂,开销略高于互斥锁,但读多写少场景下并发性能极高 | 实现简单,状态管理开销低,但并发性能差(串行执行) |
| 适用场景 | 读多写少(如缓存查询、配置读取、日志查询) | 读写频率相当、写操作频繁,或临界区代码极短(如简单计数器修改) |
| 数据一致性 | 保证读写互斥,写操作原子性,读线程获取最新值(强写者模式) | 保证所有操作原子性,数据一致性强,但串行执行导致效率低 |
举个直观的例子:假设一个电商商品详情接口,每秒有 1000 次读请求、10 次写请求(更新库存),用互斥锁时,1010 次请求会串行执行,每秒仅能处理几十次请求;用读写锁时,1000 次读请求可以并行执行,10 次写请求独占执行,每秒能处理几百甚至上千次请求,性能差距一目了然。
但如果是一个订单提交接口,每秒有 500 次读请求、500 次写请求(创建订单、修改订单),读写锁的状态切换开销会抵消并发优势,此时用互斥锁更合适——避免频繁切换读写状态,反而能提升整体效率。
3.2 读写锁 vs 自旋锁:场景选择的底层逻辑
除了互斥锁,自旋锁也是多线程同步中常用的工具,尤其在临界区代码极短的场景中。很多开发者会疑惑:读写锁和自旋锁该怎么选?核心区别在于“获取锁失败时的行为”,这也决定了二者的适用场景。
自旋锁的核心逻辑:当线程尝试获取锁失败时,不会进入休眠状态,而是循环等待(忙等),不断检查锁是否被释放,直到获取到锁为止。这种方式的优点是“无上下文切换开销”——线程不会被挂起、唤醒,切换成本低;缺点是“忙等会占用 CPU 资源”,如果临界区代码过长,会导致 CPU 使用率飙升,浪费系统资源。
读写锁的核心逻辑:当线程尝试获取锁失败时,会进入休眠状态(阻塞),线程调度器会将其挂起,释放 CPU 资源,直到锁被释放后,再被唤醒继续尝试获取锁。这种方式的优点是“不占用 CPU 资源”,适合临界区代码较长的场景;缺点是“有上下文切换开销”——线程挂起、唤醒需要消耗系统资源。
我们用一句话总结选型逻辑:临界区代码极短(如几行赋值、计数器修改),用自旋锁;临界区代码较长(如读取配置文件、查询缓存、复杂计算),且读多写少,用读写锁。
举两个实际场景:
1. 计数器修改:一个全局计数器,每秒有 1000 次自增操作(写操作),临界区代码仅一行(count++),此时用自旋锁最合适——无需上下文切换,效率最高;用读写锁反而会因为状态管理开销,导致效率下降。
2. 缓存查询:一个本地缓存,每秒有 1000 次查询(读操作)、10 次更新(写操作),查询逻辑需要读取缓存、解析数据(临界区代码较长),此时用读写锁最合适——读请求并行执行,写请求独占执行,既保证效率,又不浪费 CPU 资源;用自旋锁会导致读线程忙等,CPU 使用率飙升。
补充:自旋锁适合“单核 CPU”或“临界区极短”的场景,多核 CPU 下,读写锁在多读少写场景中的优势更明显;另外,自旋锁不能用于“递归调用”场景,而读写锁可以(但不推荐,容易导致死锁)。
四、企业级应用:读写锁的三大典型场景
理论学得再好,不如结合实际场景落地。读写锁在企业级开发中应用广泛,尤其在高并发、读多写少的场景中,是提升系统性能的“神器”。下面三个典型场景,几乎覆盖了 Linux 多线程开发中 80% 的读写锁使用场景,建议收藏备用。
4.1 缓存系统:提升查询并发量的关键
缓存系统是高并发系统的“性能基石”,核心场景就是“读多写少”——大量请求查询缓存数据,少量请求更新缓存数据(如缓存过期更新、数据变更同步)。读写锁在缓存系统中的应用,能直接突破互斥锁的串行瓶颈,提升缓存查询的并发吞吐量。
以电商系统的商品缓存为例:
商品详情页的缓存数据(商品名称、价格、库存),每秒有上万次查询请求,但更新请求仅几十次(如库存减少、价格调整)。如果用互斥锁,所有查询请求会串行排队,缓存的查询性能会大打折扣,甚至成为系统瓶颈;如果用读写锁,所有查询请求可以并行执行,更新请求独占执行,既能保证缓存数据的一致性,又能将查询并发量提升数倍。
实际开发中的小技巧:缓存查询可以使用“非阻塞读锁”——如果获取读锁失败(有写操作正在执行),可以直接返回缓存的旧数据(允许短暂的脏数据),或降级查询数据库,避免线程阻塞,进一步提升系统的响应速度;缓存更新必须使用“阻塞写锁”,确保更新操作的原子性,避免多个更新线程同时修改缓存,导致数据错乱。
4.2 配置中心:保证配置一致性与读取效率
在微服务、分布式系统中,配置中心是核心组件之一,主要负责统一管理所有服务的配置信息(如数据库地址、端口号、限流阈值)。它的核心需求很明确:多服务并发读取配置,少量场景更新配置,且配置更新后,所有服务都能读取到最新配置,保证数据一致性。
读写锁在配置中心中的应用,完美契合这一需求:
1. 配置读取:多个微服务实例(对应多个线程)同时读取配置信息时,通过“读锁共享”,实现并行读取,无需排队等待,提升配置读取的效率,避免因为配置读取阻塞,影响服务的正常运行;
2. 配置更新:当运维人员修改配置信息(如调整限流阈值)时,通过“写锁独占”,确保更新操作的原子性,避免多个更新线程同时修改配置,导致配置错乱;同时,写锁持有期间,所有读线程会阻塞,直到更新完成,确保后续的读线程能读取到最新的配置信息。
配置中心的读写锁,通常会设置为“强写者模式”——优先保证写操作的执行,避免因为大量读请求,导致配置更新被长期阻塞,确保配置更新的实时性,这也是金融、电商等对配置实时性要求高的系统的常见选型。
4.3 数据分析服务:多线程读取数据的高效方案
实时数据分析系统(如用户行为分析、日志分析),核心场景是“多线程并行读取原始数据,少量线程写入分析结果”——大量分析线程读取原始日志、用户行为数据并进行统计分析,仅有少量写线程将分析结果写入数据库或缓存。
读写锁在这类系统中的应用,能大幅提升数据分析的效率:
例如,一个用户行为分析系统,每天产生上亿条用户行为日志(如点击、浏览、下单),系统启动多个分析线程,同时读取日志文件,统计不同页面的点击量、用户留存率等指标。此时,用读写锁保护日志文件的访问:多个分析线程(读线程)可以并行读取日志文件,无需排队;少量写线程(写入分析结果)独占写锁,避免分析结果写入错乱。
相较于互斥锁,读写锁能让分析线程并行执行,减少等待时间,提升数据分析的实时性——原本需要几小时完成的分析任务,用读写锁后,可能只需几十分钟就能完成,大幅提升系统的处理效率。
五、避坑:读写锁使用的三大陷阱
读写锁虽强,但使用不当不仅无法提升性能,还可能引发死锁、数据错乱、CPU飙升等问题。
5.1 写饥饿问题:如何避免写线程长期等待
写饥饿是读写锁最常见的问题之一,核心原因很简单:读线程持续占锁,写线程长期无法获取写锁,导致写操作被无限期推迟。尤其是在“强读者模式”下,只要有读线程持有锁,新的读线程就能继续获取锁,写线程会一直排队等待,甚至被饿死。
举个例子:一个新闻资讯网站,每秒有 1000 次读请求,几乎没有间断,此时写线程(更新新闻内容)会一直无法获取写锁,导致新闻无法及时更新,影响用户体验。
解决方案(按需选择,优先推荐前两种):
1. 设置写优先属性:多数 Linux 系统的 pthread 库支持设置读写锁的写优先属性,通过修改锁属性,让写线程优先获取锁——当有写线程等待时,新的读线程无法获取锁,必须等待所有写线程执行完成后,才能获取读锁。代码示例(设置写优先):
#include<pthread.h>pthread_rwlock_t rwlock;pthread_rwlockattr_t attr;// 初始化锁属性pthread_rwlockattr_init(&attr);// 设置写优先(不同系统宏定义可能不同,如PTHREAD_RWLOCK_PREFER_WRITER_NONRECURSIVE_NP)pthread_rwlockattr_setkind_np(&attr, PTHREAD_RWLOCK_PREFER_WRITER);// 用带属性的锁初始化读写锁pthread_rwlock_init(&rwlock, &attr);
2. 限制读线程持有锁的时间:在读线程中,获取读锁后,尽快执行读操作,避免长时间持有读锁;可以设置超时机制——如果读操作执行时间过长,自动释放读锁,给写线程留出获取锁的机会。
3. 批量处理写操作:将多个写操作合并为一个批量操作,减少写线程获取锁的次数,降低写线程等待的概率。例如,缓存更新可以批量同步,每隔 100ms 批量更新一次,而非每次数据变更都立即更新。
5.2 非阻塞锁的错误处理:别踩返回值忽略的坑
很多开发者使用非阻塞读写锁(pthread_rwlock_tryrdlock、pthread_rwlock_trywrlock)时,会忽略返回值,直接重试获取锁,这会导致线程陷入死循环,占用大量 CPU 资源,甚至导致系统卡死。
错误示例(严禁这样写):
// 错误:忽略非阻塞锁的返回值,死循环重试while (1) { // 尝试获取非阻塞读锁,忽略返回值 pthread_rwlock_tryrdlock(&rwlock); // 读取共享资源 read_shared_data(); pthread_rwlock_unlock(&rwlock); break;}
上述代码中,如果获取非阻塞读锁失败(返回 EBUSY),线程会进入死循环,不断尝试获取锁,导致 CPU 使用率飙升到 100%,严重浪费系统资源。
正确做法:检查非阻塞锁的返回值,获取失败时,让线程休眠一段时间后再重试,或降级处理(如返回默认值、查询备用数据源)。
正确示例:
// 正确:处理非阻塞锁的返回值,避免死循环int ret;while (1) { // 尝试获取非阻塞读锁 ret = pthread_rwlock_tryrdlock(&rwlock); if (ret == 0) { // 获取锁成功,执行读操作 read_shared_data(); pthread_rwlock_unlock(&rwlock); break; } else if (ret == EBUSY) { // 锁被占用,休眠10ms后重试,释放CPU资源 usleep(10000); // 10ms } else { // 其他错误,降级处理,避免死循环 printf("获取读锁失败,错误码:%d\n", ret); break; }}
5.3 锁释放遗漏:杜绝死锁的关键操作
读写锁的解锁操作必须与加锁操作一一对应,一旦遗漏解锁,会导致锁被永久持有,其他线程无法获取锁,进而引发死锁——这是多线程开发中最致命的错误之一,且排查难度较大。
常见的遗漏解锁场景:
1. 临界区代码中存在异常退出(如 return、goto),导致解锁操作未执行;
2. 忘记在所有分支中解锁(如 if-else 分支,其中一个分支遗漏了解锁);
3. 线程崩溃,导致持有锁未释放。
解决方案(必看,企业级开发规范):
1. 统一在函数出口解锁:C 语言中,可通过 goto 语句,将解锁操作集中放在函数出口,确保无论代码如何分支、是否异常,都能执行解锁操作。示例:
voidread_data() { // 获取读锁 int ret = pthread_rwlock_rdlock(&rwlock); if (ret != 0) { printf("获取读锁失败\n"); return; } // 临界区代码,可能存在异常、分支 if (some_condition) { // 异常分支,通过goto跳转到解锁处 goto unlock; } read_shared_data();unlock: // 统一解锁,确保无论如何都会执行 pthread_rwlock_unlock(&rwlock);}
2. 避免在临界区中直接 return:如果必须 return,需在 return 前手动解锁;
3. 增加日志监控:在加锁、解锁操作前后打印日志,方便排查锁未释放的问题;同时,可借助 Linux 工具(如 pstack、gdb),排查死锁问题。
六、 实战:一个经典场景的读写锁实现
场景 :线程安全的缓存系统(C 语言实现)
缓存是项目中最常用的“性能加速器”,比如用户信息缓存、商品信息缓存——大部分时间都是查询(读操作),偶尔更新(写操作),完美适配读写锁的应用场景。下面用C语言实现一个线程安全的缓存系统,可直接嵌入项目使用。
在 C 语言中,我们可以利用 POSIX 线程库的读写锁来实现这样一个线程安全的缓存系统 。假设我们有一个简单的缓存结构体Cache ,它包含一个键值对数组和一个用于记录缓存项数量的变量 。
#include<stdio.h>#include<stdlib.h>#include<pthread.h>#define CACHE_SIZE 100typedef struct { int key; int value;} CacheItem;typedef struct { CacheItem items[CACHE_SIZE]; int count; pthread_rwlock_t rwlock;} Cache;// 初始化缓存voidinitCache(Cache *cache){ cache->count = 0; pthread_rwlock_init(&cache->rwlock, NULL);}// 获取缓存项intgetCacheItem(Cache *cache, int key, int *value){ pthread_rwlock_rdlock(&cache->rwlock); for (int i = 0; i < cache->count; i++) { if (cache->items[i].key == key) { *value = cache->items[i].value; pthread_rwlock_unlock(&cache->rwlock); return 1; } } pthread_rwlock_unlock(&cache->rwlock); return 0;}// 设置缓存项voidsetCacheItem(Cache *cache, int key, int value){ pthread_rwlock_wrlock(&cache->rwlock); for (int i = 0; i < cache->count; i++) { if (cache->items[i].key == key) { cache->items[i].value = value; pthread_rwlock_unlock(&cache->rwlock); return; } } if (cache->count < CACHE_SIZE) { cache->items[cache->count].key = key; cache->items[cache->count].value = value; cache->count++; } pthread_rwlock_unlock(&cache->rwlock);}// 销毁缓存voiddestroyCache(Cache *cache){ pthread_rwlock_destroy(&cache->rwlock);}// 模拟读线程函数void *reader(void *arg){ Cache *cache = (Cache *)arg; int key = rand() % 200; int value; if (getCacheItem(cache, key, &value)) { printf("Reader: Got key %d, value %d\n", key, value); } else { printf("Reader: Key %d not found\n", key); } return NULL;}// 模拟写线程函数void *writer(void *arg){ Cache *cache = (Cache *)arg; int key = rand() % 200; int value = rand() % 1000; setCacheItem(cache, key, value); printf("Writer: Set key %d, value %d\n", key, value); return NULL;}intmain(){ Cache cache; initCache(&cache); pthread_t readers[10], writers[5]; // 创建读线程 for (int i = 0; i < 10; i++) { pthread_create(&readers[i], NULL, reader, &cache); } // 创建写线程 for (int i = 0; i < 5; i++) { pthread_create(&writers[i], NULL, writer, &cache); } // 等待读线程结束 for (int i = 0; i < 10; i++) { pthread_join(readers[i], NULL); } // 等待写线程结束 for (int i = 0; i < 5; i++) { pthread_join(writers[i], NULL); } destroyCache(&cache); return 0;}
在这个实现中,读操作getCacheItem在进入关键代码段前,会先调用pthread_rwlock_rdlock获取读锁,允许多个读线程同时访问缓存 。而写操作setCacheItem则会调用pthread_rwlock_wrlock获取写锁,确保在写操作期间,其他读写线程都无法访问缓存,保证了数据的一致性 。通过这种方式,读写锁在保证线程安全的同时,最大化了缓存查询的性能,使得缓存系统能够高效地应对大量的并发读请求 。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
