KUKA机器人:SUB 程序-编程
- 2026-07-06 01:51:44
KUKA机器人:SUB 程序-编程
IF (($IN[12] == TRUE) AND ( NOT $IN[13] == TRUE)) THEN$VEL_EXTAX[2]=10$ACC_EXTAX[2]=10ASYPTP {E2 45}...IF ((NOT $IN[12] == TRUE) AND ($IN[13] == TRUE)) THEN$VEL_EXTAX[2]=10$ACC_EXTAX[2]=10ASYPTP {E2 0} 附加轴 E2 根据特定的输入端运动。在此不使用 WAIT 指令或等待循环,因其包含循环。提交解释器可以读取访问所有系统变量,也可以写入访问许多系统变量。即使在系统变量同时被一个运动程序使用时,也可访问。如果在 SUB 程序中更改提交解释器对其无写入访问权限的系统变量,则在启动程序时出现一个错误信息并且提交解释器停止。在 SUB 程序中常用的系统变量:
示例:如果没有达到编程设定的速度,则将输出端 2 设定为 FALSE。…IF (($MODE_OP == #T1) OR ($OV_PRO < 100)) THEN$OUT[2] = FALSEENDIF… 在测试运行方式下,不能从 SUBMIT 解释器写入 $OV_PRO,因为对于在工业机器人处工作的用户来说,这种变化可能是意想不到的。否则会造成死亡、身体伤害或财产损失。 尽量避免通过 SUBMIT 解释器更改与安全相关的信号和变量(例如:运行方式、紧急停止、保护门触点)。如需进行更改,则在连接所有与安全有关的信号和变量时必须使其不会被提交解释器或 PLC 控制而进入有安全危险的状态。 提交解释器可访问机器人控制系统的输入端和输出端。 对机器人解释器与 SUBMIT 解释器是否同时访问同一个输出端不予检查,因为在某些情况下可能希望如此。因此,用户必须仔细检查输出端的分配。否则可能会在例如安全装置处出现意外的输出信号。否则会造成死亡、严重身体伤害或巨大的财产损失。 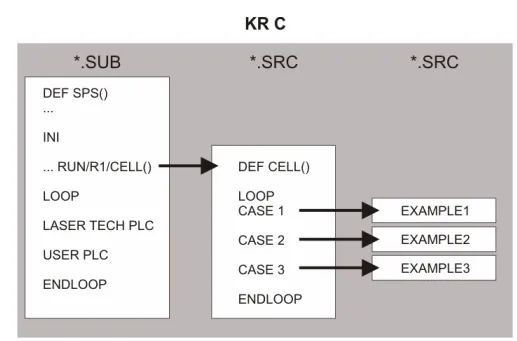
sps.sub 在机器人解释器中选择 CELL.SRC 为了在运行中的运动程序和 SUB 程序之间实现二进制信息交换,可以使用机器人控制系统旗标。旗标由提交解释器设定并且由机器人解释器读取。
在 SUB 程序中几乎所有 KRL 指令均可用。但下列指令不可用:
机器人运动指令
机器人运动只能由机器人解释器解释。因此,从 SUB 程序中也无法作为子
程序调用包含运动指令的 SRC 程序。
针对机器人运动的指令
其包括 BRAKE 和所有 TRIGGER。
与此完全相反,附加轴的运动指令可用在 SUB 程序中。示例:
在 SUB 程序中可以调用用作子程序的程序。可以是:
其他的 SUB 程序
不带机器人运动指令的 SRC 程序
示例:
从程序 SPS.SUB 中可以用 CWRITE 指令和 RUN 调用程序 CELL.SRC。调用只在冷启动时有效。
也可以用cwrite指令来调用其他的主程序,可成和Ringo都已用过
本文来自网友投稿或网络内容,如有侵犯您的权益请联系我们删除,联系邮箱:wyl860211@qq.com 。
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- Web前端实现的模拟黑客终端[附完整代码]
- 【Python 实战】仅需 5 行代码,教你轻松生成专属二维码
- Matlab与Python绘制三y轴曲线图
- 《生产安全事故分类与代码》(GB6441-2025
- 以AI为翼,以代码为梦——龙西小学信息科技科组与“ALL IN AI”同行
- Cursor 保姆实战教程,1人0代码挑战开发大型项目 NiukX
- Python concurrent模块详细介绍
- 生命代码:谷歌DeepMind的再跨越
- 不会写代码,我是怎么把 Claude 用成“职场外挂”的?Claude Code 自定义 Skill 入门指南
- 【跟着AI学Python】简易通讯录小项目
