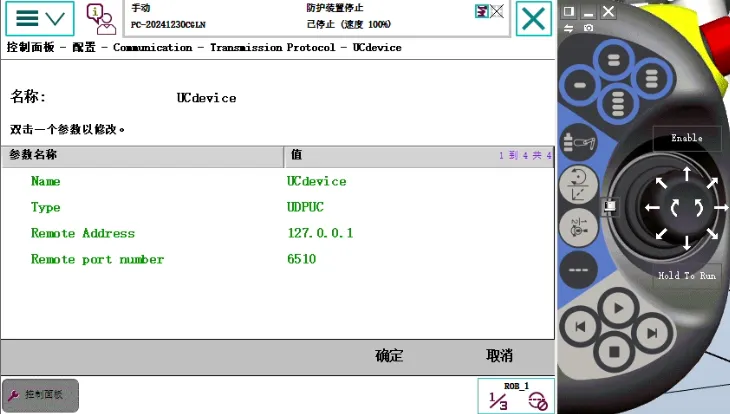
PERS tooldata gripper:=[TRUE,[[0,0,150],[1,0,0,0]],[1,[0,0,1],[1,0,0,0],0,0,0]];CONST robtarget p20:=[[1414.27,556.31,369.97],[0.707107,-6.93795E-8,0.707107,1.49614E-7],[0,0,-1,1],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];VAR egmident egmID1;CONST egm_minmax egm_minmax_lim:=[-1,1];VAR egmstate egmSt1:=0;PERS pose pose0:=[[0,0,0],[1,0,0,0]];PROC EGM_RUN() EGMReset egmID1; EGMGetId egmID1;! EGMSetupUC ROB_1,egmID1,"default","UCdevice"\Pose\CommTimeout:=10;! EGMActPose egmID1\StreamStart\Tool:=gripper\WObj:=wobj0, pose0, EGM_FRAME_WORLD, pose0, EGM_FRAME_WORLD\X:=egm_minmax_lim\Y:=egm_minmax_lim\Z:=egm_minmax_lim\MaxSpeedDeviation:=40;! EGMRunPose egmID1, EGM_STOP_HOLD\X\Y\Z\CondTime:=0.01\RampInTime:=0.08; EGMSetupUC ROB_1,egmID1,"default","UCdevice"\Joint\CommTimeout:=10; EGMActJoint egmID1\J1:=egm_minmax_lim\J2:=egm_minmax_lim\J3:=egm_minmax_lim\J4:=egm_minmax_lim\MaxSpeedDeviation:=60; EGMRunJoint egmID1,EGM_STOP_HOLD\J1\J2\J3\J4\J5\J6\CondTime:=3\RampInTime:=0.05; MoveJ p20, v150, z50, gripper; EGMReset egmID1;ENDPROC

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
