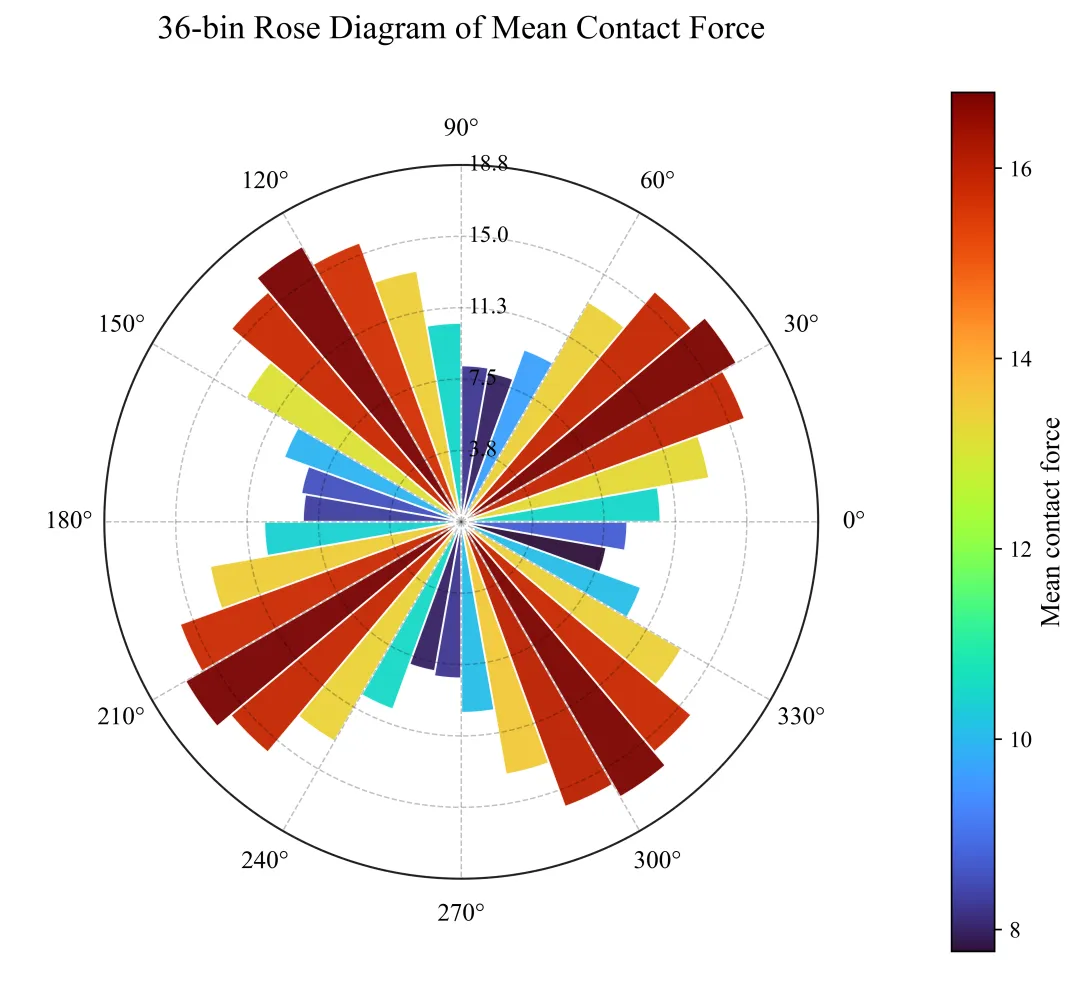
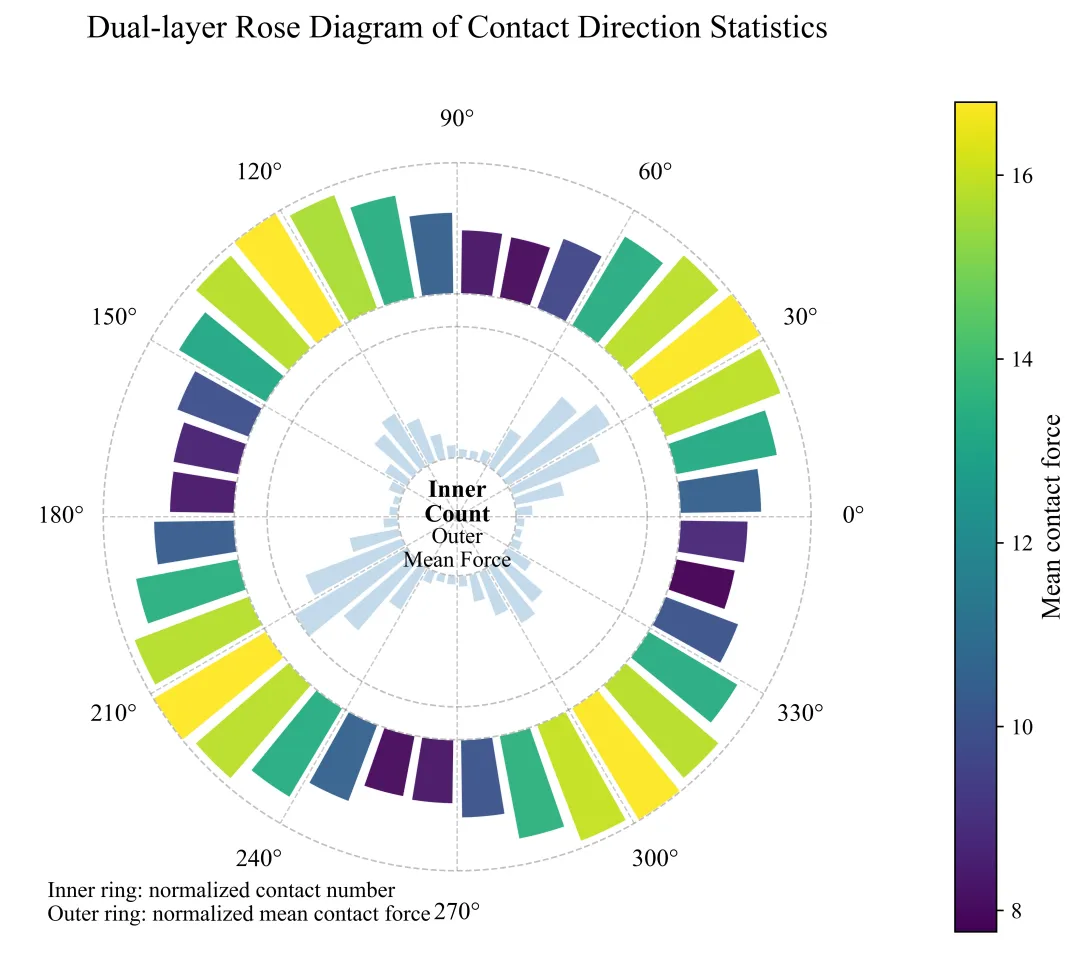
import osimport numpy as npimport matplotlib.pyplot as pltfrom matplotlib.patches import Wedgefrom matplotlib.colors import Normalizefrom matplotlib.cm import ScalarMappablenp.random.seed(2026)plt.rcParams["font.family"] = "Times New Roman"plt.rcParams["axes.unicode_minus"] = Falseplt.rcParams["figure.dpi"] = 160plt.rcParams["savefig.dpi"] = 600out_dir = "python_contact_rose_figures"os.makedirs(out_dir, exist_ok=True)def generate_contact_data(n=5000): """ 随机生成离散元接触方向数据 angle_deg : 接触法向角度,单位 degree,范围 0~360 contact_force : 接触力大小 """ # 设置几个主要接触方向,模拟颗粒材料中的各向异性 main_dirs = np.array([35, 125, 215, 305]) # 不同主方向出现概率不同 group = np.random.choice( len(main_dirs), size=n, p=[0.34, 0.16, 0.34, 0.16] ) # 主方向附近随机扰动 angle_deg = np.random.normal( loc=main_dirs[group], scale=13, size=n ) # 加入一部分均匀随机背景接触 n_background = int(0.20 * n) angle_deg[:n_background] = np.random.uniform(0, 360, size=n_background) angle_deg = np.mod(angle_deg, 360) # 构造接触力:让接触力也随方向变化 theta = np.deg2rad(angle_deg) force_direction_effect = ( 8.0 + 4.8 * np.cos(2 * (theta - np.deg2rad(35))) ** 2 + 2.2 * np.cos(4 * (theta - np.deg2rad(35))) ) force_random = np.random.gamma( shape=2.2, scale=0.85, size=n ) contact_force = force_direction_effect + force_random contact_force = np.clip(contact_force, 0.2, None) return angle_deg, contact_forceangle_deg, contact_force = generate_contact_data(n=5000)n_bins = 36edges_deg = np.linspace(0, 360, n_bins + 1)centers_deg = (edges_deg[:-1] + edges_deg[1:]) / 2mean_force = np.zeros(n_bins)sum_force = np.zeros(n_bins)max_force = np.zeros(n_bins)count_force = np.zeros(n_bins)for i in range(n_bins): left = edges_deg[i] right = edges_deg[i + 1] if i < n_bins - 1: mask = (angle_deg >= left) & (angle_deg < right) else: mask = (angle_deg >= left) & (angle_deg <= right) count_force[i] = np.sum(mask) if np.any(mask): mean_force[i] = np.mean(contact_force[mask]) sum_force[i] = np.sum(contact_force[mask]) max_force[i] = np.max(contact_force[mask]) else: mean_force[i] = 0 sum_force[i] = 0 max_force[i] = 0# 3. 图1:36 等分接触力均值玫瑰图def draw_mean_force_rose(): values = mean_force.copy() color_values = mean_force.copy() cmap = plt.get_cmap("turbo") norm = Normalize( vmin=np.min(color_values), vmax=np.max(color_values) ) rmax = np.max(values) * 1.12 if rmax <= 0: rmax = 1 fig, ax = plt.subplots(figsize=(7.6, 7.6)) ax.set_aspect("equal") ax.axis("off") # 绘制36个扇形柱 for k in range(n_bins): theta1 = edges_deg[k] theta2 = edges_deg[k + 1] wedge = Wedge( center=(0, 0), r=values[k], theta1=theta1, theta2=theta2, width=values[k], facecolor=cmap(norm(color_values[k])), edgecolor="white", linewidth=0.9, alpha=0.96 ) ax.add_patch(wedge) # 径向网格圈 theta = np.linspace(0, 2 * np.pi, 800) ring_values = np.linspace(0, rmax, 6)[1:] for rr in ring_values: ax.plot( rr * np.cos(theta), rr * np.sin(theta), linestyle="--", linewidth=0.7, color="black", alpha=0.25 ) # 角度辐射线 angle_ticks = np.arange(0, 360, 30) for a in angle_ticks: ar = np.deg2rad(a) ax.plot( [0, rmax * np.cos(ar)], [0, rmax * np.sin(ar)], linestyle="--", linewidth=0.7, color="black", alpha=0.25 ) # 最外圈 ax.plot( rmax * np.cos(theta), rmax * np.sin(theta), color="black", linewidth=1.0, alpha=0.85 ) # 径向刻度文字 for rr in ring_values: x = rr * np.cos(np.deg2rad(90)) y = rr * np.sin(np.deg2rad(90)) ax.text( x + 0.02 * rmax, y, f"{rr:.1f}", fontsize=11, ha="left", va="center" ) # 角度标注 for a in angle_ticks: ar = np.deg2rad(a) x = rmax * 1.10 * np.cos(ar) y = rmax * 1.10 * np.sin(ar) ax.text( x, y, f"{a}°", fontsize=12, ha="center", va="center" ) sm = ScalarMappable(norm=norm, cmap=cmap) sm.set_array([]) cbar = fig.colorbar( sm, ax=ax, shrink=0.78, pad=0.04 ) cbar.set_label("Mean contact force", fontsize=13) cbar.ax.tick_params(labelsize=11) ax.set_title( "36-bin Rose Diagram of Mean Contact Force", fontsize=16, pad=18 ) lim = rmax * 1.25 ax.set_xlim(-lim, lim) ax.set_ylim(-lim, lim) plt.tight_layout() plt.savefig( os.path.join(out_dir, "01_mean_contact_force_rose.png"), bbox_inches="tight", facecolor="white" )draw_mean_force_rose()# 4. 图2:双层方向统计玫瑰图# 内层:接触数量# 外层:平均接触力def draw_dual_layer_rose(): count_norm = count_force / np.max(count_force) force_norm = mean_force / np.max(mean_force) cmap = plt.get_cmap("viridis") norm = Normalize( vmin=np.min(mean_force), vmax=np.max(mean_force) ) fig, ax = plt.subplots(figsize=(7.8, 7.8)) ax.set_aspect("equal") ax.axis("off") r_inner_base = 0.18 r_inner_max = 0.58 r_outer_base = 0.68 r_outer_max = 1.08 # 内层:接触数量 for k in range(n_bins): theta1 = edges_deg[k] + 0.8 theta2 = edges_deg[k + 1] - 0.8 r = r_inner_base + count_norm[k] * (r_inner_max - r_inner_base) wedge = Wedge( center=(0, 0), r=r, theta1=theta1, theta2=theta2, width=r - r_inner_base, facecolor="#BFD7EA", edgecolor="white", linewidth=0.8, alpha=0.92 ) ax.add_patch(wedge) # 外层:平均接触力 for k in range(n_bins): theta1 = edges_deg[k] + 0.8 theta2 = edges_deg[k + 1] - 0.8 r = r_outer_base + force_norm[k] * (r_outer_max - r_outer_base) wedge = Wedge( center=(0, 0), r=r, theta1=theta1, theta2=theta2, width=r - r_outer_base, facecolor=cmap(norm(mean_force[k])), edgecolor="white", linewidth=0.8, alpha=0.96 ) ax.add_patch(wedge) # 网格圈 theta = np.linspace(0, 2 * np.pi, 800) for rr in [r_inner_base, r_inner_max, r_outer_base, r_outer_max]: ax.plot( rr * np.cos(theta), rr * np.sin(theta), linestyle="--", linewidth=0.8, color="black", alpha=0.25 ) # 角度辐射线 angle_ticks = np.arange(0, 360, 30) for a in angle_ticks: ar = np.deg2rad(a) ax.plot( [0, r_outer_max * np.cos(ar)], [0, r_outer_max * np.sin(ar)], linestyle="--", linewidth=0.7, color="black", alpha=0.22 ) # 角度标注 for a in angle_ticks: ar = np.deg2rad(a) x = r_outer_max * 1.12 * np.cos(ar) y = r_outer_max * 1.12 * np.sin(ar) ax.text( x, y, f"{a}°", fontsize=12, ha="center", va="center" ) # 中心说明 ax.text( 0, 0.04, "Inner\nCount", fontsize=12, ha="center", va="center", weight="bold" ) ax.text( 0, -0.10, "Outer\nMean Force", fontsize=11, ha="center", va="center" ) # 左下角说明 ax.text( -1.25, -1.18, "Inner ring: normalized contact number\nOuter ring: normalized mean contact force", fontsize=11, ha="left", va="center" ) sm = ScalarMappable(norm=norm, cmap=cmap) sm.set_array([]) cbar = fig.colorbar( sm, ax=ax, shrink=0.75, pad=0.05 ) cbar.set_label("Mean contact force", fontsize=13) cbar.ax.tick_params(labelsize=11) ax.set_title( "Dual-layer Rose Diagram of Contact Direction Statistics", fontsize=16, pad=18 ) lim = 1.35 ax.set_xlim(-lim, lim) ax.set_ylim(-lim, lim) plt.tight_layout() plt.savefig( os.path.join(out_dir, "02_dual_layer_contact_rose.png"), bbox_inches="tight", facecolor="white" )draw_dual_layer_rose()