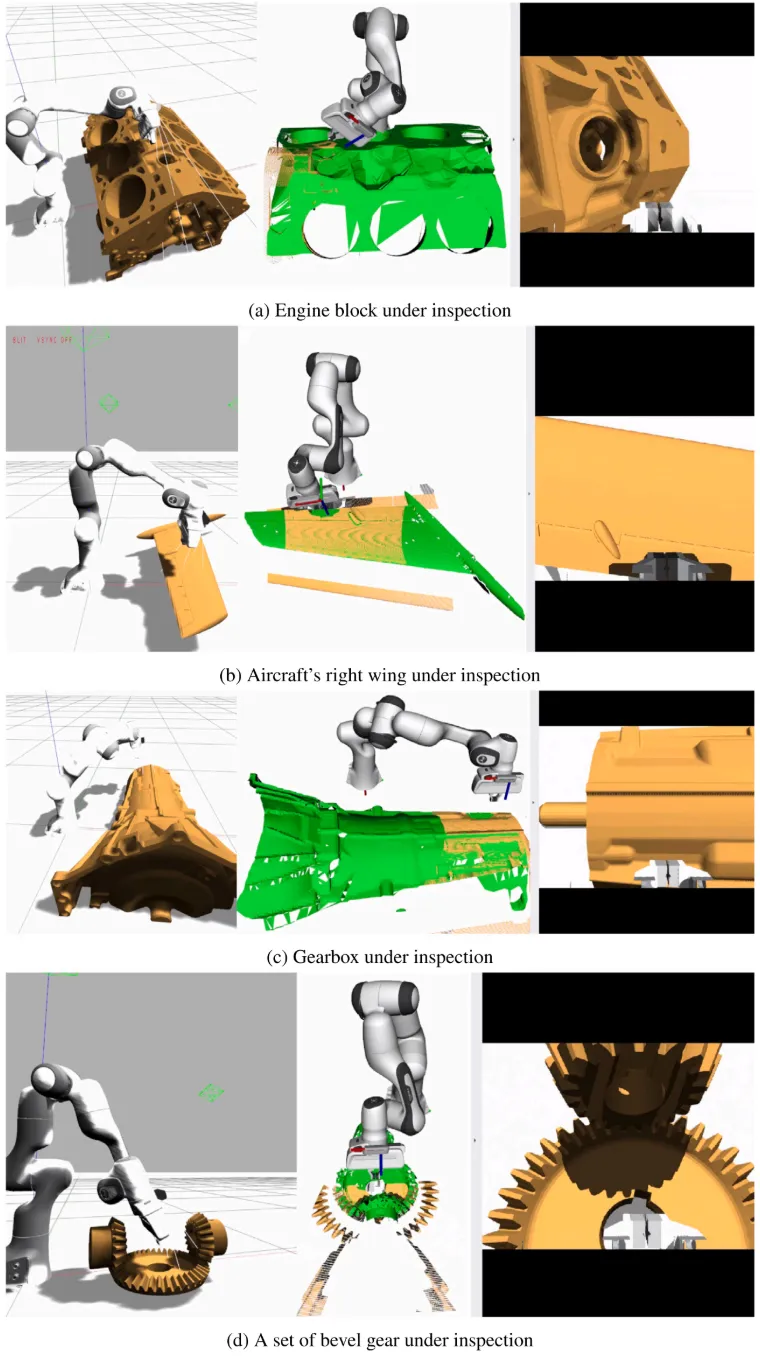
三、实战演练:多物体检查
在实验室环境下,研究人员测试了系统处理多种复杂物体的能力,包括发动机缸体、飞机右翼、齿轮箱等。
单物体与多物体检查演示:
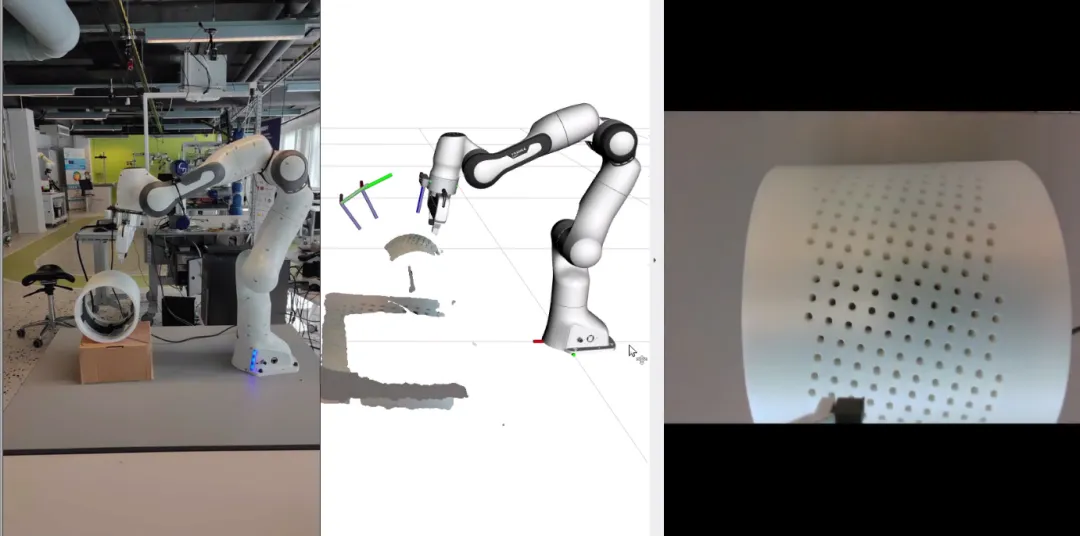
最令人惊艳的是,该系统引入了防碰撞流水线。它会利用深度相机实时生成物体的网格模型(Mesh),并将其反馈给运动规划器,确保机器人在绕着复杂零件旋转时,绝不会撞到周围的障碍物。
即使是像曲轴(Crankshaft)这样几何形状极其复杂的零件,机器人也能根据用户的自然语言(如:“Hey Franka,选择绕Y轴的五个剖面”)自动生成精准的检查点位。
四、隐私与成本:为什么本地化部署是关键?
很多企业对“云端AI”心存戒虑——谁也不想把工厂的核心参数上传到互联网上。
这项研究的一个核心贡献就是证明了:不需要顶级昂贵的服务器,单张 RTX 3060 显卡就能跑通整套流程!研究团队对比了8款主流开源模型,发现:
- Qwen2.5-Coder-1.5B 在速度、精度和资源占用之间达到了完美的平衡,显存仅占用3.4 GB,准确率高达86%,平均响应时间只需1.29秒。
- 如果追求更高精度,Qwen2.5-Coder-7B 能达到92%的成功率,响应速度甚至更快,仅需1.17秒。
这意味着,中小企业完全可以利用现有的硬件资源,在离线环境下部署属于自己的“AI质检助理”。
五、未来的工厂
当然,目前的系统仍有局限性。在极端嘈杂的环境下,语音识别有时会出错;在极近距离内,机器人偶尔还是会碰到障碍物。但这项研究无疑开启了一扇大门:自然语言、生成式AI与机器人的深度融合,正在让制造业变得更加人性化和智能化。
想象一下,未来的技工不再需要坐在电脑前盯着枯燥的代码行,而是戴着耳机,像指导学徒一样指导身边的机器人:“嘿,看这里,帮我仔细检查一下这几个焊点。”
这不正是我们期待的科技魅力吗?
想了解更多细节?该项目的代码和演示视频已在 GitHub 开源:RoboSpection。https://github.com/CuriousLad1000/RoboSpection
参考文献:Tasneem, O., & Pieters, R. (2026). Human–robot collaborative visual inspection with Large Language Models. Robotics and Computer-Integrated Manufacturing.
如果还有疑问,直接点击下方链接来问我(汇集了本公众号所有文章的大模型)吧!