1. 引脚复用的硬件背景与演进
现代片上系统(SoC)在单一硅芯片内集成通用处理器核心、片上存储器、各类外设控制器、高速接口与多媒体模块,形成高度整合的硬件计算平台。受制于封装工艺、物理尺寸、成本与散热条件,芯片对外可提供的物理引脚数量存在严格上限,无法为每一个内部硬件模块提供独立专用的信号引脚。在嵌入式处理器发展初期,片上外设数量较少,引脚功能固定且一对一分配给对应硬件模块,硬件设计直接将专用引脚与外设连接,系统启动后无需对引脚功能进行重新配置。随着半导体工艺的提升,SoC集成度呈指数级提升,内部可支持的UART、SPI、I2C、以太网、SDIO、显示接口、音频接口等模块数量远超物理引脚总数,单一引脚必须承担多种硬件功能,引脚复用(Pin Muxing)技术由此成为现代SoC设计的必需环节。引脚复用的核心价值是在软件控制下,通过配置寄存器,动态选择同一物理引脚的功能,使有限的引脚资源服务于多组不同的外设模块。例如,同一组引脚可在一种工作模式下作为UART收发接口,在另一种模式下切换为SPI总线,或配置为通用GPIO端口。与此同时,引脚复用的配置方式从早期硬编码、厂商私有接口,逐步走向标准化、统一化的操作系统内核管理模型。2. 引脚复用的硬件实现原理
2.1 硬件组成结构
SoC内部实现引脚复用的核心硬件单元包括:物理引脚焊盘、多路选择器(MUX)、引脚功能控制寄存器、电气属性配置寄存器、输入输出缓冲电路。多路选择器是功能切换的核心,其输入端连接不同外设模块的信号通路,输出端连接至物理引脚,通过配置寄存器的值选择某一路输入导通。引脚功能控制寄存器采用内存映射I/O(MMIO)方式寻址,CPU通过标准的load/store指令完成读写,实现功能选择。电气属性配置寄存器用于设置上拉/下拉电阻、开漏/推挽输出、驱动强度、输入使能、输出使能等参数,保证不同电气标准的外设可靠工作。2.2 控制逻辑与约束
引脚复用的硬件操作本质是向指定MMIO寄存器写入功能选择值与电气配置值。多数SoC采用独立寄存器控制单个引脚,部分低成本平台会将多个引脚的控制位合并为一组寄存器。引脚复用在硬件层面存在严格约束:同一引脚同一时刻只能归属一种功能,不支持并行复用;部分外设模块受内部硬件路由限制,仅能映射到固定的引脚集合;不同功能对应不同的电气约束,如I2C必须配置为开漏输出且使能上拉。2.3 电气配置对复用的影响
引脚电气属性与功能复用强相关。推挽输出适用于高速同步接口,开漏输出配合外部上拉适用于I2C等多主设备总线,上拉/下拉配置用于避免空闲状态电平浮动。这些配置与功能选择由同一组寄存器控制,因此引脚复用与电气配置必须统一管理,这也是Pinctrl子系统将二者整合的硬件依据。3. 引脚复用管理的历史演进与标准化需求
3.1 早期管理方式的缺陷
在Linux 2.6早期版本中,内核未提供统一的引脚管理框架,引脚复用配置存在三种典型方式:设备驱动直接读写硬件寄存器、板级启动代码固化配置、芯片厂商提供私有API。这些方案带来如下工程问题:- 资源冲突:多个驱动同时配置同一引脚,导致功能异常、总线锁死或系统崩溃;
- 代码冗余:同类外设驱动重复实现引脚配置逻辑,维护成本高;
- 可移植性差:私有接口不具备跨平台能力,驱动移植需重写硬件相关代码;
- 调试困难:配置逻辑分散在启动流程、驱动、平台代码中,故障难以定位;
- 功耗不友好:无法根据设备状态动态切换引脚配置,增加系统待机功耗。
3.2 统一框架的诞生
Linux内核社区借鉴时钟、电源、GPIO子系统的设计模型,于2.6.37版本正式引入引脚控制子系统(Pinctrl Subsystem),实现引脚复用、电气配置、资源管理、状态切换的统一抽象。其核心目标包括:屏蔽硬件寄存器差异、集中管理引脚资源避免冲突、解耦设备驱动与底层硬件、支持运行时动态状态切换、与设备树(Device Tree)深度融合。4. Linux内核Pinctrl子系统概述
4.1 核心功能
Pinctrl子系统是内核用于统一管理SoC引脚资源的标准框架,承担以下功能:- 引脚配置管理:统一设置电气参数,包括上拉/下拉、驱动强度、开漏等;
- 引脚分组管理:将相关引脚归为逻辑组,支持批量配置;
- 多状态管理:支持default、sleep、idle等状态,满足电源管理需求;
- 调试接口:通过debugfs输出引脚状态与配置信息。
4.2 设计模型
- 提供者:引脚控制器驱动,由芯片厂商实现,枚举引脚、分组、功能与寄存器操作;
- 消费者:各类设备驱动,通过声明方式申请引脚状态,由子系统自动完成配置。
子系统严格遵循硬件描述与软件逻辑分离原则,所有引脚硬件信息通过设备树描述,内核代码保持平台无关。4.3 代码组织结构
Pinctrl子系统核心代码位于drivers/pinctrl/:- pinctrl-core.c:核心逻辑、资源管理、API实现;
- pinctrl-devicetree.c:设备树解析与绑定;
- pinctrl-utils.c:分组、冲突检测等工具函数;
- pinctrl-.c:各平台厂商驱动; 头文件位于include/linux/pinctrl/,对外提供统一接口。
5. Pinctrl子系统核心数据结构
5.1 引脚描述
struct pinctrl_pin_desc { unsigned int number; /* 全局唯一引脚编号 */ const char *name; /* 引脚名称 */ const void *drv_data; /* 驱动私有数据 */};
5.2 引脚分组
struct pin_group { const char *name; const unsigned int *pins; unsigned int nr_pins; const unsigned int *funcs; unsigned int nr_funcs;};
5.3 引脚功能
struct pin_function { const char *name; const unsigned int *groups; unsigned int nr_groups;};
5.4 控制器描述
struct pinctrl_desc { struct device *dev; const struct pinctrl_pin_desc *pins; unsigned int npins; const struct pinctrl_ops *pctlops; const struct pinmux_ops *pmxops; const struct pinconf_ops *confops; struct module *owner;};
5.5 操作回调集合
- pinctrl_ops:枚举分组、设备树节点映射;
5.6 状态管理
struct pinctrl_state { const char *name; struct list_head settings;};struct pinctrl { struct device *dev; struct list_head states; struct pinctrl_state *state;};
6. Pinctrl子系统软件架构与分层
6.1 三层架构
- 核心层:实现统一逻辑、资源管理、设备树解析、API导出;
6.2 标准执行流程
- 引脚控制器驱动初始化,注册pinctrl_desc;
- 电源管理事件触发时,自动切换sleep/default状态;
6.3 与其他子系统协同
Pinctrl与GPIO子系统、电源管理子系统、设备树子系统深度协同:GPIO子系统依赖Pinctrl完成功能切换;电源管理依赖Pinctrl实现低功耗状态;设备树提供硬件描述。7. 引脚复用的设备树描述规范
7.1 引脚控制器节点
pinctrl: pinctrl@44e10800 { compatible = "ti,am335x-pinctrl"; reg = <0x44e10800 0x1000>; #pinctrl-cells = <1>;};
7.2 引脚配置节点
i2c0_pins: i2c0-pins { pinctrl-single,pins = < 0x170 0x2e 0x174 0x2e >;};
7.3 消费者设备绑定
i2c0: i2c@44e0b000 { compatible = "ti,omap4-i2c"; pinctrl-names = "default", "sleep"; pinctrl-0 = <&i2c0_pins>; pinctrl-1 = <&i2c0_sleep_pins>;};
7.4 绑定规则
8. 引脚控制器驱动实现规范
8.1 实现步骤
8.2 关键回调示例
staticintsoc_pinmux_set_mux(struct pinctrl_dev *pctldev, unsigned int selector, unsigned int group, unsigned int func){ struct soc_pinctrl *ipctl = pinctrl_dev_get_drvdata(pctldev); const struct soc_pin_group *grp = &soc_groups[group]; unsigned int i; for (i = 0; i < grp->nr_pins; i++) { unsigned int pin = grp->pins[i]; void __iomem *reg = ipctl->base + pin_offsets[pin]; unsigned int val = pin_values[pin][func]; writel(val, reg); } return 0;}
8.3 驱动注册
staticintsoc_pinctrl_probe(struct platform_device *pdev){ struct soc_pinctrl *ipctl; ipctl = devm_kzalloc(&pdev->dev, sizeof(*ipctl), GFP_KERNEL); ipctl->base = devm_ioremap_resource(&pdev->dev, platform_get_resource(pdev, IORESOURCE_MEM, 0)); ipctl->desc = &soc_pinctrl_desc; ipctl->pctldev = devm_pinctrl_register(&pdev->dev, ipctl->desc, ipctl); platform_set_drvdata(pdev, ipctl); return 0;}
9. 设备驱动作为消费者的使用流程
9.1 无API方式
绝大多数驱动无需调用Pinctrl API,仅需在设备树声明pinctrl-names与pinctrl-0/1,内核在设备初始化时自动完成配置。9.2 显式API使用
struct pinctrl *p = devm_pinctrl_get(dev);struct pinctrl_state *s = pinctrl_lookup_state(p, "default");pinctrl_select_state(p, s);
9.3 驱动注意事项
10. 结语
引脚复用是现代SoC架构的基础能力,Linux Pinctrl子系统通过标准化、统一化的框架解决了资源冲突、可移植性、功耗与调试等关键问题。从硬件原理、内核架构、设备树绑定、驱动实现到调试排错,引脚复用贯穿嵌入式Linux系统开发全流程。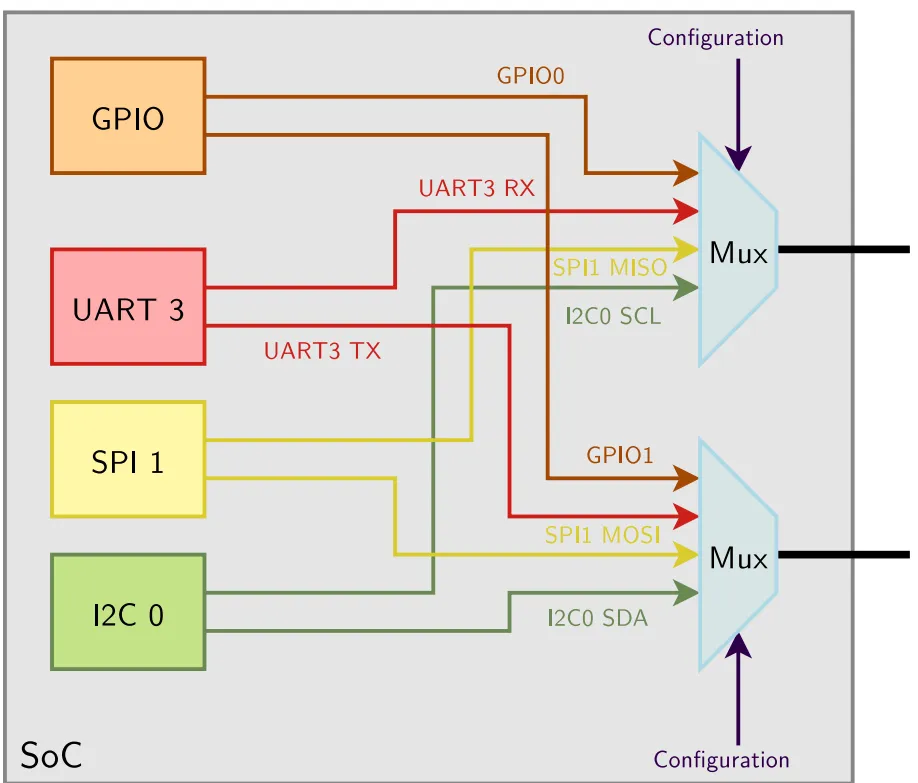

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
