第一章:中断为什么需要 Bottom Half
1.1 硬中断不能执行太久
Linux 驱动里最容易犯的错误,就是把大量逻辑直接塞进中断函数。比如 UART 中断里直接做协议解析、内存申请、链表操作,甚至 printk 调试。设备速率一高,CPU 很快就会被 IRQ 打满,系统出现明显卡顿,严重时连调度器都抢不到时间片。
Linux 内核很早就把中断处理拆成了两部分:Top Half 和 Bottom Half。Top Half 只负责最关键的事情,例如读取状态寄存器、清中断、搬运 FIFO;剩余耗时逻辑延后处理。这样做的核心目的并不是“异步”,而是尽量缩短关中断时间,提高整个系统实时性。
1.2 Bottom Half 的本质
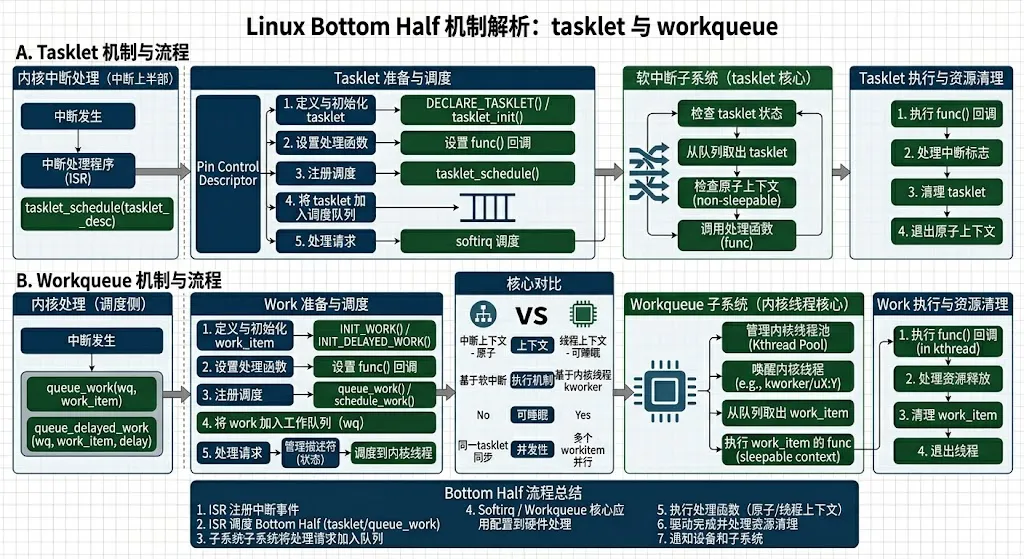
所谓 Bottom Half,本质就是“延迟执行”。硬中断只负责快速响应硬件,真正的数据处理放到稍后执行。Linux 早期出现过 BH、Task Queue,后来逐渐统一到了 softirq 体系,tasklet 和 workqueue 都是建立在它之上的封装,整个流程其实很简单:
IRQ到来 ↓Top Half快速处理 ↓唤醒Bottom Half ↓延后执行耗时逻辑
网卡、USB、块设备、串口、SPI 驱动基本都在使用这套模型。尤其高速设备里,如果没有 Bottom Half,CPU 会长期陷入硬中断上下文,系统吞吐会急剧下降。
第二章:Softirq 与 Tasklet
2.1 Softirq 是真正的底层机制
Linux Bottom Half 的核心其实是 softirq。内核里预定义了多个 softirq 类型,例如网络收包、定时器、tasklet 都属于 softirq。硬中断退出时,内核会检查 pending bitmap,如果发现有 softirq 被触发,就立即执行对应处理函数。
softirq 最大特点是性能高,因为它仍然运行在中断上下文,不需要线程切换。但问题也很明显:不能睡眠、不能阻塞,而且同一种 softirq 可以在多个 CPU 上同时运行,所以开发难度很高。Linux 网络栈里的 NET_RX_SOFTIRQ 就是典型代表。
内核里能看到:
enum { HI_SOFTIRQ, TIMER_SOFTIRQ, NET_TX_SOFTIRQ, NET_RX_SOFTIRQ, TASKLET_SOFTIRQ,};
很多人以为 tasklet 是独立机制,其实它本质上还是跑在 TASKLET_SOFTIRQ 上。
2.2 tasklet 为什么出现
softirq 性能虽然高,但驱动开发太痛苦。因为 SMP 下同一个 softirq 可能并发运行,锁处理稍微有问题就会出现竞态。所以 Linux 后来又封装了一层 tasklet,用来简化驱动开发。
tasklet 最大特点是“同一个 tasklet 实例不会并发执行”。这个特性非常重要,因为它天然避免了 SMP 重入问题。很多老驱动,尤其网卡和串口驱动,大量使用 tasklet,定义方式也很简单:
staticvoiduart_tasklet_func(unsignedlong data);DECLARE_TASKLET(uart_tasklet, uart_tasklet_func, 0);
中断里直接调度:tasklet_schedule(&uart_tasklet);
这样硬中断里只做快速收数,协议解析放到 tasklet 里完成,中断延迟会明显降低。
第三章:tasklet 执行过程
3.1 tasklet 如何运行
tasklet 本质上只是 softirq 的一个链表节点。调用 tasklet_schedule() 后,内核会把对应 tasklet 挂到 TASKLET_SOFTIRQ 队列,然后在 softirq 阶段统一执行,实际流程:
IRQ ↓tasklet_schedule() ↓raise_softirq() ↓__do_softirq() ↓tasklet_action() ↓tasklet func
由于 tasklet 仍然运行在软中断上下文,所以限制其实很多。比如不能 sleep、不能 mutex_lock、不能调用可能阻塞的接口。如果在 tasklet 里执行 schedule(),内核会直接报 BUG。
很多驱动早期喜欢在 tasklet 里做大量事情,例如 SPI 数据解析、协议栈处理,但后来发现这种模式很容易导致 softirq 长时间占用 CPU,引发系统抖动。
3.2 一个典型 tasklet 驱动
下面这个 UART 驱动结构在老内核里很常见。中断只负责快速读 FIFO,真正解析放到 tasklet。
irqreturn_tuart_irq(int irq, void *dev_id){ struct uart_dev *uart = dev_id; uart_read_fifo(uart); tasklet_schedule(&uart->rx_tasklet); return IRQ_HANDLED;}
tasklet 处理:
staticvoiduart_rx_tasklet(unsignedlong data){ struct uart_dev *uart = (struct uart_dev *)data; parse_frame(uart);}
这种结构的好处很明显:IRQ 时间很短,不会长时间占用 CPU。但问题也同样明显,如果 parse_frame() 太重,softirq 仍然可能跑飞,所以现代驱动已经越来越少直接使用 tasklet。
第四章:workqueue 机制
4.1 为什么需要 workqueue
tasklet 解决了“延后执行”的问题,但它依然运行在中断上下文,因此很多事情仍然做不了。比如 mutex、文件 IO、copy_to_user、msleep 这些操作都可能睡眠,而软中断上下文绝对不允许睡眠。
于是 Linux 又引入了 workqueue。它的核心思想很直接:既然中断上下文限制太多,那干脆把 Bottom Half 放进内核线程里执行。这样驱动就可以像普通进程一样运行复杂逻辑,workqueue 最大区别就是:
tasklet:中断上下文workqueue:进程上下文
这意味着 workqueue 可以安全睡眠。
4.2 workqueue 的运行方式
workqueue 本质上就是“工作队列 + kworker 内核线程”。驱动提交 work 后,真正执行逻辑的是内核 worker thread。
定义方式:struct work_struct rx_work;
初始化:
INIT_WORK(&uart->rx_work, uart_rx_work_func);
调度:schedule_work(&uart->rx_work);
worker 执行:
staticvoiduart_rx_work_func( struct work_struct *work){ mutex_lock(&uart->lock); process_data(); mutex_unlock(&uart->lock);}
这里已经能安全使用 mutex,因为它本质上已经属于线程上下文。
第五章:高级 workqueue
5.1 delayed_work
Linux 里很多周期任务并不需要 timer + 线程两套机制,直接 delayed_work 就够了。它本质上是“延迟执行的 workqueue”。
初始化:INIT_DELAYED_WORK(&monitor_work, monitor_func);
延迟调度:schedule_delayed_work(&monitor_work, msecs_to_jiffies(1000));
1 秒后自动执行。很多驱动里的 watchdog、状态轮询、链路检测其实都是这么做的,因为它比 timer 更容易写复杂逻辑。
5.2 单线程 workqueue
默认 workqueue 可能并发执行。如果驱动本身是串行状态机,例如 SPI、I2C、固件升级,就可能需要单线程 workqueue。
创建方式:wq = create_singlethread_workqueue( "uart_wq");
提交:queue_work(wq, &uart->rx_work);
这样所有任务都会进入同一个 worker thread,不会出现并发执行问题。很多老驱动喜欢靠 spinlock 硬控并发,但实际上单线程 workqueue 更稳定,也更容易调试。
第六章:现代 Linux 为什么减少 tasklet
6.1 tasklet 的问题
tasklet 当年很流行,因为它比 workqueue 更轻量,延迟也更低。但随着 Linux 内核越来越强调 PREEMPT_RT、实时性以及线程化,tasklet 的问题逐渐暴露出来。
首先它仍然属于 softirq,上下文限制太多;其次 softirq 本身不太适合实时系统;再加上 SMP 下调试困难,很多 tasklet 问题都属于偶发 BUG,定位成本极高,尤其高负载下,经常出现:
softirq占满CPUksoftirqd飙高系统延迟抖动
这些问题在网络场景非常典型。
6.2 threaded irq 正在替代 tasklet
现代 Linux 更推荐 threaded irq + workqueue 组合。request_threaded_irq() 可以直接把 IRQ 后半部分放进线程里执行,很多场景已经不再需要 tasklet,比如:
request_threaded_irq(irq, top_half, thread_fn, IRQF_ONESHOT, "uart", dev);
现在很多新驱动结构已经变成:
IRQ快速ACK ↓IRQ Thread ↓workqueue ↓协议处理
这种结构虽然上下文切换更多,但逻辑更清晰,也更符合 Linux 近年来“线程化、可抢占、实时化”的演进方向。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
