linux内核中device_node 转换成 platform_device
📢本篇将介绍通过设备树 device_node 转换成 platform_device
device 部分是用 platform_device 结构体来描述硬件资源的, 所以内核最终会将内核认识的 device_node 树转换 platform_ device, 但是并不是所有的 device_node 都会被转换成 platform_ device, 只有满足要求的才会转换成 platform_ device,转换成 platform_device 的节点可以在/sys/bus/platform/devices 下查看, 那 device_node 节点要满足什么要求才会被转换成 platform_device 呢?- 规则 1: 首先遍历根节点下包含 compatible 属性的子节点, 对于每个子节点, 创建一个对应的 platform_device。
- 规则 2: 遍历包含 compatible 属性为 “simple-bus”、 “simple-mfd” 或 “isa” 的节点以及它们的子节点。 如果子节点包含 compatible 属性值则会创建一个对应的 platform_device。
- 规则 3:检查节点的 compatible 属性是否包含 “arm” 或 “primecell”。 如果是, 则不将该节点转换为 platform_device, 而是将其识别为 AMBA 设备。
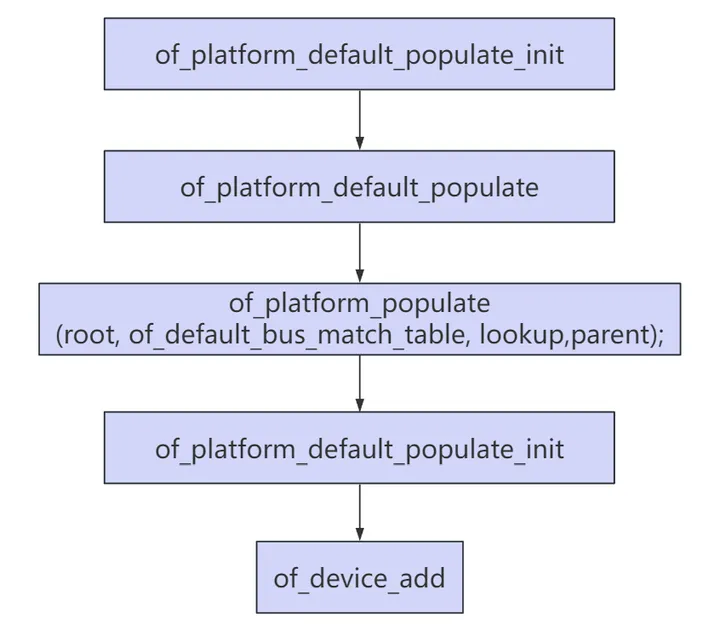
device_node 转换成 platform_device 的函数调用流程图如下:首先进入到内核源码目录下的“drivers/of/platform.c” 文件中, 找到第 555 行, 具体内容如下所示:arch_initcall_sync(of_platform_default_populate_init);
arch_initcall_sync 是 Linux 内核中的一个函数, 用于在内核初始化过程中执行架构相关的初始化函数。 它属于内核的初始化调用机制, 用于确保在系统启动过程中适时地调用特定架构的初始化函数。在 Linux 内核的初始化过程中, 各个子系统和架构会注册自己的初始化函数。 这些初始化函数负责完成特定子系统或架构相关的初始化工作, 例如初始化硬件设备、 注册中断处理程序、设置内存映射等。 而 arch_initcall_sync 函数则用于调用与当前架构相关的初始化函数。当内核启动时 , 调用 rest_init() 函数来启动初始化过程 。 在初始化过程中 ,arch_initcall_sync 函数会被调用, 以确保所有与当前架构相关的初始化函数按照正确的顺序执行。 这样可以保证在启动过程中, 特定架构相关的初始化工作得到正确地完成。而 of_platform_default_populate_init 函数的作用是在内核初始化过程中自动解析设备树,并根据设备树中的设备节点创建对应的 platform_device 结构。 它会遍历设备树中的设备节点,并为每个设备节点创建一个对应的 platform_device 结构, 然后将其注册到内核中, 使得设备驱动程序能够识别和操作这些设备。 该函数的具体内容如下所示: