从今天开始,我准备给自己挖一个大坑:从零基础开始,系统地梳理下 Mesa 3D 驱动的内部实现,以及 Intel DRI 驱动的工作原理。之前虽然写过一些零散的博客,但始终缺少一次完整的整理。于是就有了这个系列,先从 Linux 图形栈说起,对整体框架做一个简要介绍。
要深入理解当今的 Linux 图形栈,首先需要回顾其历史背景及演进过程。这将为理解其架构和各个组成模块奠定基础。
一:2D图形阶段
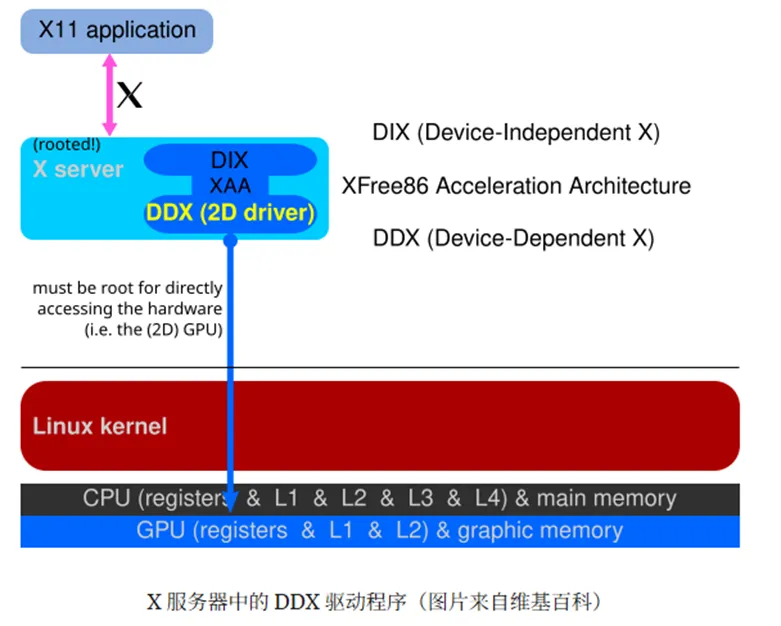
在早期的设计中,只有 X 服务器能够直接与图形硬件交互。这种集中式的访问模式简化了整个图形堆栈的实现,因为无需在多个客户端之间协调对图形硬件的并发访问。
在这个时期,应用程序的所有绘制工作都是通过 X 服务器间接完成的。应用使用 Xlib 接口,通过 X11 协议向X 服务器发送渲染请求;X 服务器接收并解析这些请求,然后将其转换为底层图形硬件能够理解的命令并执行。需要注意的是,这一转换过程实际上由图形驱动程序完成:驱动接收一组与具体硬件无关的渲染指令作为输入,并将其翻译为目标 GPU 所期望的硬件指令。
由于 X 服务器是唯一能够与图形硬件直接通信的软件,这些图形驱动程序也都是专门为 X 服务器编写的,并作为其内部模块存在,成为 X 服务器架构中不可或缺的一部分。这类运行在用户空间的驱动程序在 X 服务器的术语中被称为 DDX(Device Dependent X)驱动。它们在图形堆栈中的主要职责,是为 Xlib 所导出的接口提供支持,实现 X 服务器所需的各类 2D 图形操作。例如,在早期的Ubuntu系统中,Intel GPU的DDX驱动通常由xserver-xorg-video-intel软件包提供,其他GPU供应商也有各自对应的DDX实现。
二:3D图形阶段
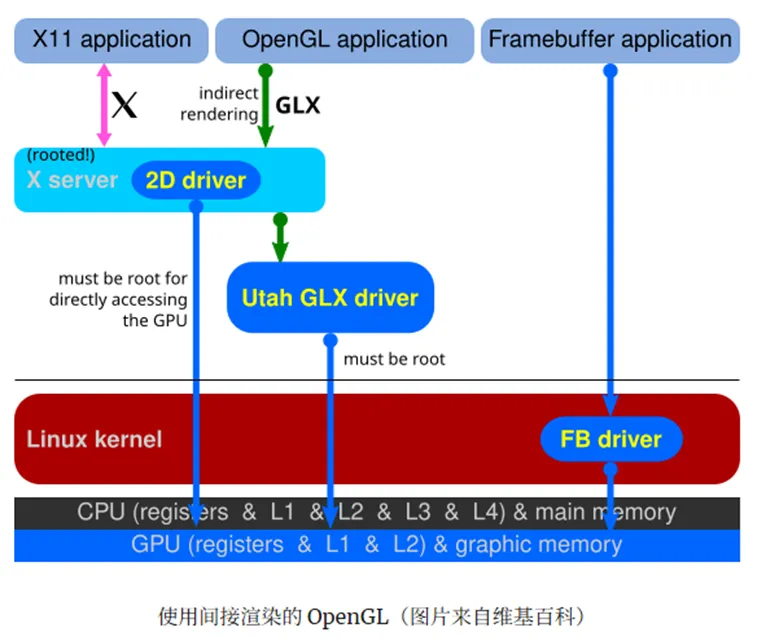
前面的设计架构主要针对2D图形绘制,因为X服务器最初正是为2D绘制而设计的。然而,随着3D图形硬件的出现,这一局面被彻底改变,接下来我们将对这一演进过程进行更详细的说明。在Linux系统中,3D图形通常通过OpenGL来实现,因此人们自然希望该标准的实现能够充分利用现代3D图形硬件,即使用硬件加速的libGL.so。然而,在早期的架构中,只有X服务器才能直接访问图形硬件,这使得应用程序无法通过libGL.so与3D硬件直接通信。
为了解决这一问题,人们提供了一种 OpenGL 的实现方式:通过 X11 协议的扩展,将 OpenGL 命令发送给 X 服务器,再由 X 服务器像处理 2D 绘制命令一样,将这些 OpenGL 命令转换为实际的硬件指令。这种渲染方式被称为“间接渲染”(Indirect Rendering),因为应用程序并不直接向图形硬件提交渲染命令,而是经由 X 服务器间接完成整个渲染过程。
然而,很快开发者便意识到,这种方案并不足以满足游戏等高强度 3D 应用的需求。这类应用需要在渲染大量 3D 场景的同时保持较高的帧率,而将 OpenGL 调用封装并通过 X11 协议传递,本身就引入了显著的开销,显然不是一种高效的解决方式。要在 3D 应用中获得可接受的性能,应用程序必须能够更直接地访问图形硬件,这也迫使人们重新审视并重构 Linux 图形栈中的很大一部分设计。
四:直接渲染架构(DRI)
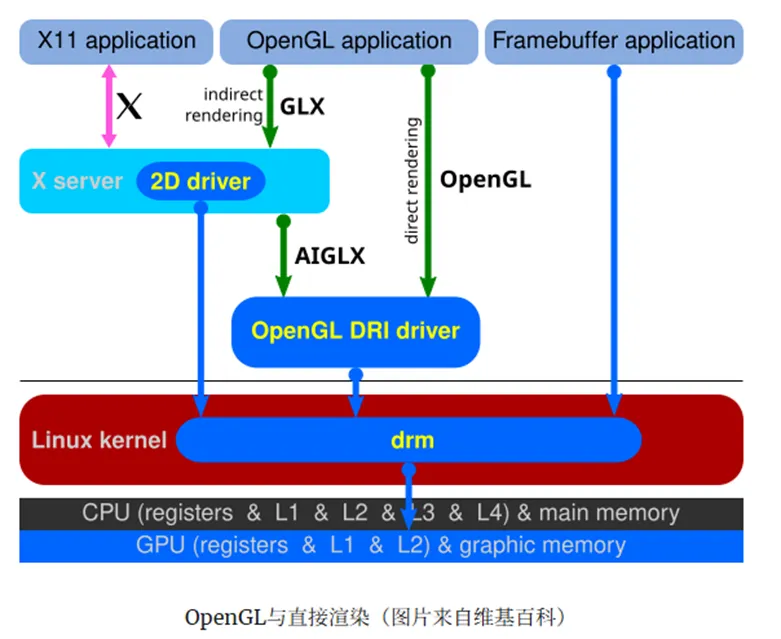
正是在这样的背景下,直接渲染架构(Direct Rendering Infrastructure,简称 DRI)应运而生。DRI 引入了一种全新的架构,使得 X 客户端能够在受控的前提下直接与图形硬件进行通信。为了实现这一目标,Linux 图形栈的多个组成部分都需要进行相应的改造和配合,包括 X 服务器、内核,以及各类图形客户端程序。
尽管DRI一词通常用来指代整个直接渲染架构,但在很多语境下,它也被用来特指其中应用程序与 X 服务器交互的那一部分。因此,在查阅相关资料时,需要注意这一术语所具有的双重含义。DRI架构中的另一个关键组成部分是直接渲染管理器(Direct Rendering Manager,简称 DRM),它位于内核空间,构成了 DRI 的内核端实现。内核端负责处理诸如硬件访问控制、并发同步以及显存管理等敏感问题。与此同时,DRM 还向用户空间提供了一套 API,使用户空间程序能够以符合现代 GPU 要求的格式提交命令和数据,从而在受控的环境下实现与图形硬件的高效通信。
需要注意的是,许多底层操作都必须针对具体的硬件进行专门实现,因此每一种 GPU都对应着不同的 DRM 驱动程序,这些驱动构成了 GPU 的内核态驱动(Kernel Mode Driver,简称 KMD)。在 Ubuntu 系统中,以 Intel GPU 为例,其 DRM/KMS 内核模块由内核本身提供(如 i915模块),而用户空间则通过 libdrm提供的库接口与内核中的DRM 驱动进行交互。
五:引入Mesa
DRI/DRM 提供了必要的构建模块,使用户空间应用程序能够在高效且安全的前提下直接访问图形硬件。然而,要在此基础上使用 OpenGL,还需要额外的软件层来实现 OpenGL API。这个软件既要利用 DRI/DRM 提供的底层功能,又要满足 X 服务器的接口和规范要求,从而保证应用程序能够通过标准化的方式进行 3D 渲染。
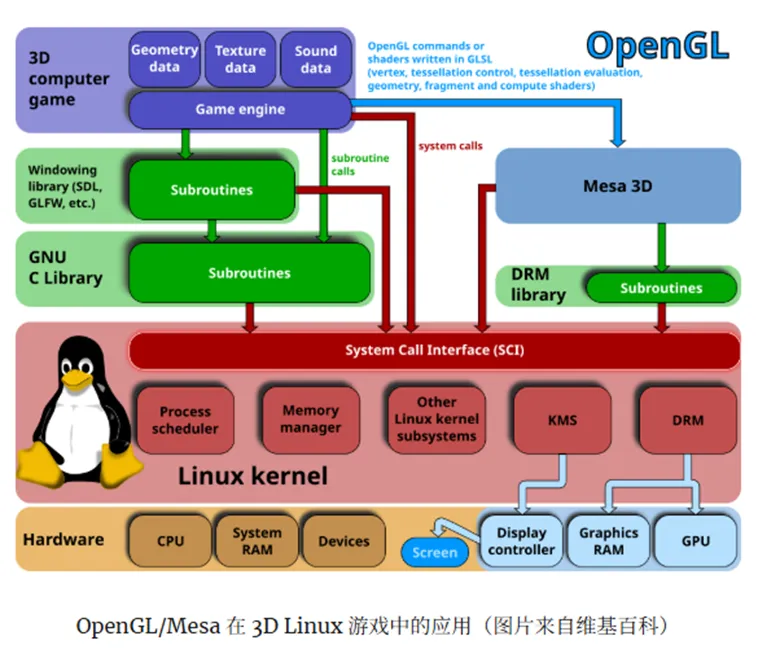
Mesa 是 OpenGL 规范的自由软件实现,它提供了libGL.so库,使基于 OpenGL 的应用程序能够在 Linux 系统上渲染 3D 图形。Mesa利用 DRI 架构直接访问底层图形硬件,从而在实现OpenGL API 的同时,提供高效的 3D 图形性能。
当我们的 3D 应用程序在X11 环境中运行时,它会将图形输出到由 X 服务器分配的表面(窗口)。需要注意的是,在使用 DRI 的情况下,渲染过程无需 X 服务器直接参与,但为了确保显示正确,两者之间仍需进行必要的同步。X 服务器依然管理着 Mesa 渲染的窗口,并负责将其内容显示到屏幕上。OpenGL 应用程序与 X 服务器之间的这种同步机制,正是 DRI 架构的一部分。Mesa 对GLX(OpenGL 在 X11 平台的扩展接口)的实现正是通过 DRI 与 X 服务器进行通信,以完成这种同步操作。
Mesa 在执行许多操作时也依赖DRM。它与图形硬件的通信通常以发送命令(例如“绘制一个三角形”)和数据(如三角形的顶点坐标、颜色属性、法线等)的形式进行。为了让 GPU 能够访问这些信息并执行渲染任务,通常需要在图形硬件上分配一系列缓冲区,并将所有命令和数据复制到这些缓冲区中。DRM 驱动程序负责管理显存,并向用户空间(在本例中为 Mesa)提供 API,使其能够针对特定硬件执行这些操作。换言之,每当 Mesa 需要分配或管理显存时,都会调用 DRM 提供的接口;诸如创建纹理、上传数据到纹理、分配颜色缓冲区、深度缓冲区或模板缓冲区等操作,都依赖于针对目标硬件的 DRM API。
六:总结
至此,我希望读者对 Mesa 在 Linux 图形栈中的角色已经有了基本的理解,以及它如何依托直接渲染基础架构(DRI)来通过 OpenGL 实现高效的 3D 渲染。在下一篇文章中,我们将更深入地探究 Mesa 本身,了解它作为一个框架所包含的多个 OpenGL 驱动,包括硬件和软件实现。同时,我们会梳理其目录结构,识别核心模块,并介绍 Gallium 框架及其在 Mesa 中的作用,让大家对整个架构有更直观的认识。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
